Vikbar 3D tryckt Quadcopter (3 / 5 steg)
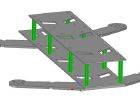
Steg 3: Ram församling















Efter att du har Skriv ut delarna du kan börja bygga ramen:
Börja med den övre ram, har du att skära och löda igen strömkabeln för QBRAIN och modul för att passa in i den designade bostäder, sedan passera signalkabeln i hålet och sätta allt på sin plats.
Ta den undre ramen, passera kabel för motorn i hålen, kardborreband och nära 2 hälften av ramen med de 2 främre skruvarna och de 2 mittersta skruvarna.
Placera i position batterihållaren och säkra den med 4 skruvar.
(Obs: för Arm församlingen anser för att ha 2 främre arm med 1 motor CCW och 1 motor CW, och samma för baksida arm. Varje tryckt Arm stöd har 3 fördjupningen för mantaining position när du dra 4 arm skruvarna, dessa håligheter har bo uppåt)
Nu församlingen i Arm, säkra motorn med de 4 skruvarna på sidan stöd för Motor, sätt in alluminium profil i det fyrkantiga hålet (du kan använda lite lim eller borra profilen för en säkerhet skruv), sedan infoga den Arm stöd på andra sidan av profilen (borra och säkerhet skruv, hand om skruven position, plats det externt från ramen inte limma nu om du vill använda den kabel blockerat).
Infoga församlingen i ram anche thighten 4 skruvarna i armen (jag föreslår att använda skruv med Allen huvud, lättare att tight och lös för fastspänning arm öppna eller stänga)
Nu kan du förkorta den QBRAIN kabeln (bara detta, eftersom du måste testa motor rotation innan förkorta motor kabeln) titta på bilden, kan du klippa det som du vill (bara kolla längden för slutna och öppna arm), men i detta fall jag inte kan vända motor kabeln om jag kopplar bort dem. Jag har försökt att utforma en enkel kabel blockerare (ingår ej) men jag är inte riktigt nöjd, kanske en enklare ziptie kommer att göra arbetet bättre
Nästa: skriva ut FC stöd, och på den nedre delen skära ett fyrkantigt hål (Använd en fräs värms upp av en tändare) i närheten av hålet för signalkabeln för QBRAIN. Passera kabeln genom hålet, och säkra FC stöd med 4 skruvar, montera dämpningen bollen, och den övre delen.
Sista steget är montera den RC och telemetri stöder bara sätta på plats och tight en skruv på baksidan, på framsidan kommer att bakre Arm skruven att slå allt med den baldakin.

3D tryckt Quadcopter projekt

3D tryckt Quadcopter med Arduino

DIY tryckta Quadcopter Joystick och RAM

3D tryckt QuadCopter

Begginner's Guide: 3D tryckt Quadcopter

3D tryckt 250 Racing Quadcopter

Göra en H Quadcopter med 3D utskrift

3D tryckt Mini Quadcopter

Micro 105 FPV Quadcopter - 3D tryckt

3D tryckt vikbara telefonen Stand

3D tryckt & kolfiber QuadCopter

Bygga din egen 3D tryckt Mini Racing Quadcopter

250 quadcopter, full bygga
300 storlek V ram Quadcopter

Lägga till en Flip knapp till en Quadcopter

Bygga en HK X650F quadcopter för GoPro stil video och foto

Bygga en DIY Quadcopter: en nybörjare Guide

DIY Nybörjarens Quadcopter
