Wiimote Wireless ändring för personer med funktionshinder (2 / 17 steg)
Steg 2: Programmera Arduino: sändare
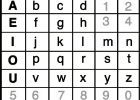
Arduino sändaren var programmerad så att när en eller flera av växlar ansluten till den digitala i/o 2-13 trycktes att en viss bokstav i alfabetet skulle överföras trådlöst via följetong. Till exempel det växla 1 var att vara avstängd, bokstaven "a" sändes trådlöst över följetong. Om switch 1 skulle vara på var sedan bokstaven "b" skickas trådlöst över följetong. Om växel 2 var att vara avstängd, sändes bokstaven "c" trådlöst över följetong. Om växel 2 var vara påslagen skickades bokstaven "d". Ett exempel på den hela seriell överföringen för 12 switchar kan ses nedan:
• Exempel 1: Switch 1 och 3 är stängda, alla andra växlar är öppna
o "bcfgikmoqsuw"
• Exempel 2: Switch 2, 3 och 5 är stängda, och alla andra växlar är öppen
o "adfgjkmoqsuw"
Nedan är fördelningen av hur Arduino sändaren var programmerad.
1. ta bort den Proto sköld från Arduino som du väljer som sändaren. ATMEGA mikroprocessorn bör i Arduino styrelsen.
2. Ladda ner programmet Arduino från Arduino webbplats (www.arduino.cc)
3. Anslut Arduino till en dator via USB-kabeln.
4. öppna programmet Arduino programvara på din dator
5. Välj Verktyg -> Serial Port -> och sedan välja den COM port som hänvisar till din Arduino ombord. Detta är vanligtvis den första COM-porten i listan.
6. Kopiera och klistra in följande kod i kod-fönstret Arduino. Observera att denna kod är för överföring på en 19200 baud. Om du behöver överföra på olika baudvärde än var i koden det står 19200, ändra den till din önskade överföringshastigheten.
Detta program skickar information från en MaxStream XBee radio.
följetong ut är på port 1
följetong i är på port 0
en digital ingång är på portar 2-13
int switchPin2 = 2;
int switchPin3 = 3;
int switchPin4 = 4;
int switchPin5 = 5;
int switchPin6 = 6;
int switchPin7 = 7.
int switchPin8 = 8;
int switchPin9 = 9;
int switchPin10 = 10;
int switchPin11 = 11;
int switchPin12 = 12;
int switchPin13 = 13.
en byte sända data:
char thisByte2 = 0;
char thisByte3 = 0;
char thisByte4 = 0;
char thisByte5 = 0;
char thisByte6 = 0;
char thisByte7 = 0;
char thisByte8 = 0;
char thisByte9 = 0;
char thisByte10 = 0;
char thisByte11 = 0;
char thisByte12 = 0;
char thisByte13 = 0;
Ogiltiga inställningar () {
rätt inställda pins till ingång och utgång
pinMode (switchPin2, ingång);
pinMode (switchPin3, ingång);
pinMode (switchPin4, ingång);
pinMode (switchPin5, ingång);
pinMode (switchPin6, ingång);
pinMode (switchPin7, ingång);
pinMode (switchPin8, ingång);
pinMode (switchPin9, ingång);
pinMode (switchPin10, ingång);
pinMode (switchPin11, ingång);
pinMode (switchPin12, ingång);
pinMode (switchPin13, ingång);
starta upp seriell anslutning med 19200-8-n-1-true (inverterad):
Serial.BEGIN(19200);
av någon anledning verkar det att hjälpa till att skicka ett godtyckligt tecken först
sedan paus för vakt tiden innan du begär kommando-läge
Serial.Print("X");
Delay(1100);
lägga till XBee i kommando-läge
Serial.Print("+++");
Delay(1100);
vänta på ett svar från XBee för 2000 ms eller starta
över med installationsprogrammet om inget giltigt svar kommer
om (returnedOK() == 'T') {
om en OK mottogs då fortsätta
}
annat {
Setup(); annars gå tillbaka och försök setup igen
}
Ställ pannan (personligt nätverk) ID-nummer
i detta exempel används 0x3330, men ska du välja din egen
unika hexadecimaltalet mellan 0x0 och 0xFFFE
(Observera kommatecknet i slutet av kommandot som anger att ett annat kommando kommer att följa)
Serial.Print("ATID3330,");
Ange Destination höga till 0x0
att välja 16-bitars adressering läge. Dessa adresser kan
fastställas och ändras genom att skicka kommandon från en mikrokontroller
Serial.Print("DH0,");
Ange Destination låg (16-bitars adress)
Detta exempel använder 0x0 för Sänd och 0x1 för ta emot men du kommer
vill välja din egen hexadecimala tal mellan 0x0 och 0xFFFE
Serial.Print("DL1,");
Exit kommando-läge (Observera att vi använder Serial.printLN här för att utfärda en radmatning som kompletterar kommandosekvens)
Serial.println("CN");
föregående kommandona kan också skickas på en enda rad som denna, med ett enda kommando med kommatecken:
Serial.println("ATID3330,DH0,DL1,CN");
föregående kommandoraden kan också skickas som separata kommandon, av återlansera AT-kommandot:
Serial.println("ATID3330");
Serial.println("ATDH0");
Serial.println("ATDL1");
Serial.println("ATCN");
vänta på ett svar från XBee för 2000 ms eller starta
över med installationsprogrammet om inget giltigt svar kommer
om (returnedOK() == 'T') {
om en OK mottogs då fortsätta
}
annat {
Setup(); annars gå tillbaka och försök setup igen
}
}
Ogiltig loop () {
Läs växeln:
thisByte2 = digitalRead(switchPin2);
konvertera den till en läsbar ASCII-värdet, skicka ut den seriella porten:
Delay(20);
om (thisByte2 == 0) {
thisByte2 = "a"; }
om (thisByte2 == 1) {
thisByte2 = "b";}
Serial.Print(thisByte2);
thisByte3 = digitalRead(switchPin3);
Delay(20);
om (thisByte3 == 0) {
thisByte3 = 'c'; }
om (thisByte3 == 1) {
thisByte3 = hade ";}
Serial.Print(thisByte3);
thisByte4 = digitalRead(switchPin4);
Delay(20);
om (thisByte4 == 0) {
thisByte4 = "e"; }
om (thisByte4 == 1) {
thisByte4 = "f";}
Serial.Print(thisByte4);
thisByte5 = digitalRead(switchPin5);
Delay(20);
om (thisByte5 == 0) {
thisByte5 = 'g'; }
om (thisByte5 == 1) {
thisByte5 = "h";}
Serial.Print(thisByte5);
thisByte6 = digitalRead(switchPin6);
Delay(20);
om (thisByte6 == 0) {
thisByte6 = "i"; }
om (thisByte6 == 1) {
thisByte6 = "j";}
Serial.Print(thisByte6);
thisByte7 = digitalRead(switchPin7);
Delay(20);
om (thisByte7 == 0) {
thisByte7 = "k"; }
om (thisByte7 == 1) {
thisByte7 = 'l';}
Serial.Print(thisByte7);
thisByte8 = digitalRead(switchPin8);
Delay(20);
om (thisByte8 == 0) {
thisByte8 = är "; }
om (thisByte8 == 1) {
thisByte8 = 'n ";}
Serial.Print(thisByte8);
thisByte9 = digitalRead(switchPin9);
Delay(20);
om (thisByte9 == 0) {
thisByte9 = ' o '; }
om (thisByte9 == 1) {
thisByte9 = "p";}
Serial.Print(thisByte9);
thisByte10 = digitalRead(switchPin10);
Delay(20);
om (thisByte10 == 0) {
thisByte10 = 'q'; }
om (thisByte10 == 1) {
thisByte10 = "r";}
Serial.Print(thisByte10);
thisByte11 = digitalRead(switchPin11);
Delay(20);
om (thisByte11 == 0) {
thisByte11 = 's "; }
om (thisByte11 == 1) {
thisByte11 = 't ";}
Serial.Print(thisByte11);
thisByte12 = digitalRead(switchPin12);
Delay(20);
om (thisByte12 == 0) {
thisByte12 = 'u'; }
om (thisByte12 == 1) {
thisByte12 = "v";}
Serial.Print(thisByte12);
thisByte13 = digitalRead(switchPin13);
Delay(20);
om (thisByte13 == 0) {
thisByte13 = 'w'; }
om (thisByte13 == 1) {
thisByte13 = "x";}
Serial.Print(thisByte13);
}
char returnedOK () {
denna funktion kontrollerar svaret på den seriella porten till se om den var en "OK" eller inte
char incomingChar [3].
char okString [] = "OK";
char resultatet = 'n';
int startTime = millis();
medan (millis() - startTime < 2000 & & resultatet == 'n') {/ / använda en timeout på 10 sekunder
om (Serial.available() > 1) {
Läs tre inkommande byte som bör vara "O", "K" och radmatning:
för (int jag = 0; jag < 3; i ++) {
incomingChar [i] = Serial.read();
}
om (strstr (incomingChar, okString)! = NULL) {/ / kolla om respons är "OK"
om (incomingChar [0] == ' o ' & & incomingChar [1] == "K") {/ / kolla om de två första tecknen är "OK"
resultat = 'T'; återvändande T var om "OK" svaret
}
annat {
resultat = "F"; annars returnera F
}
}
}
returnera resultat;
}
7. När koden har kopierats till Arduino kod-fönstret, välj "Kompilera" för att kontrollera att det finns några fel i koden. Om inga fel finns trycker på "Ladda upp till i/o-styrelsen-knappen".
8. När koden har överförts till Arduino styrelsen, koppla bort USB-kabeln och sätta tillbaka den ProtoShield (inklusive Xbee modulen). Du är nu klar ladda upp koden till Arduino sändaren.

Wiimote ändring för personer med funktionshinder

DIY hund koppel system att hjälpa personer med funktionshinder

GEST BITRÄTT FJÄRRBRYTARE kontroll för personer med funktionshinder

Anpassningsbar dricka stöd för personer med funktionshinder
Kommunikation ombord för individer med funktionshinder

MATIMI - övervakning och hjälpmedel teknik för personer med rörelsehinder

Modifierade spjälsäng för förälder med funktionshinder

Guiden personal med magiska ljuseffekter

Nederländska kanel godis - sundare version, lämplig för personer med diabetes

Plånbok för personer med spasticitet

Laser MIDI-Instrument för personer med fysiska funktionshinder

Ett utsnitt för personer med handikapp hand

Analog bild-i-bild Video Rig. Fånga innehåll och person med bra ljud, samtidigt med en kamera.

Avmonterbara kontakt personal med eld/ledde-huvuden

Linjära glid Arm tråg för barn med funktionshinder

Nyckel Turner (för personer med arthiritis)

Gest, röst, joystick baserat rullstolen för människor med funktionshinder!

Rag klämma stöd till personer med endast en funktionell arm
