Xenio-bot "Bil kontrolleras av Bluetooth" (5 / 6 steg)
Steg 5: Gör din egen skriptkod i Arduino eller använda våra egna script-kod!


Det sista vi har gjort är en app för android-enheter är huvudsyftet med vår app Bluetooth kommunikationen mellan den smarta telefonen och modulen.
Vårt arduino koden är:
#include < SoftwareSerial.h >
Inicializacion de los pines
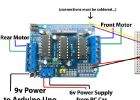
int bluetoothTx = 1;
int bluetoothRx = 0;
Variablerna que corresponden en cada stifts del Arduino, se omiten el pin 0 y pin 1 ya que estos se utilizan en la comunicación seriell que se establece entre el Arduino y el módulo Bluetooth
int pin2 = 2;
int pin3 = 3;
int pin4 = 4;
int pin5 = 5;
int pin6 = 6;
int pin7 = 7.
int pin8 = 8;
int pin9 = 9.
int pin10 = 10;
int pin11 = 11;
int pin12 = 12;
int pin13 = 13.
Varables de kontroll utilizadas para controlar la velocidad de los fenor DC
int velocidad = 255;
int velocidad2 = 255;
SoftwareSerial bluetooth (bluetoothTx, bluetoothRx);
Declaracion de los metodos que vamos en utilizar
void adelante();
void reversa();
void giro_derecha();
void giro_izquierda();
void pararMotorTraccion();
void pararMotorDireccion();
void encenderLuz();
void apagarLuz();
void encenderComponente();
void apagarComponente();
void encenderComponente2();
void apagarComponente2();
void encenderComponente3();
void apagarComponente3();
void modificarVelocidad (int vel);
void setup()
{
Iniciamos la comunicacion seriell con el USB-y declaramos como salidas los pines que vamos en utilizar
Serial.BEGIN(9600);
pinMode (pin2, produktionen);
pinMode (pin3, produktionen);
pinMode (pin4, produktionen);
pinMode (pin5, produktionen);
pinMode (pin6, produktionen);
pinMode (pin7, produktionen);
pinMode (pin8, produktionen);
pinMode (pin9, produktionen);
pinMode (pin10, produktionen);
pinMode (pin11, produktionen);
pinMode (pin12, produktionen);
pinMode (pin13, produktionen);
Configuramos la conexion seriell del bluetooth con el android
Bluetooth.BEGIN(115200);
Bluetooth.Print("$$$");
Delay(100);
Bluetooth.println("U,9600,N");
Bluetooth.BEGIN(9600);
}
void loop()
{
Leemos del Bluetooth y escribimos en el följetong
IF(Bluetooth.available())
{
röding fick = bluetooth.read();
char toSend = (char)bluetooth.read();
Serial.Print(toSend);
}
SI el android le manda algo al arduino este metodo toma el caracter que mando
y en basera en eso ejecuta el metodo deseado
IF(Serial.available())
{
char toSend = (char)Serial.read();
Bluetooth.Print(toSend);
Switch(toSend)
{
SI recibe una C entra en el modo de kontroll por medio de la pantalla Cardux
fallet "C":
Lee el siguiente pin y en bas al numero o letra enciende el pin correspondiente
IF(Serial.available())
{
char toSend2 = (char)Serial.read();
Bluetooth.Print(toSend2);
Switch(toSend2) {
Botón de adelante presionado
fallet "W": adelante (pin5, pin6); bryta;
Botón de reversa presionado
fallet ": reversa (pin5, pin6); bryta;
Botón de izquierda presionado
ärende 'A': giro_izquierda (PIN2-, pin3); bryta;
Botón de Izquierda presionado
fallet skulle ': giro_derecha (PIN2-, pin3); bryta;
Este medoto se ejecuta al dejar de presionar el boton de adelante o reversa
fallet "Z": pararMotor (pin5, pin6); bryta;
Este medoto se ejecuta al dejar de presionar el boton de Izquierda o izquierda
ärende 'X': pararMotor (PIN2-, pin3); bryta;
Cuando el växla de Luces esta sv estado encendido
fallet "I": encenderLuz(pin4); bryta;
Cuando el växla de Luces esta sv estado apagado
fallet ' o ': apagarLuz(pin4); bryta;
Cuando el switch de Dator1 esta sv estado encendido
"H" i mål: encenderComponente(pin8); bryta;
Cuando el switch de Dator1 esta sv estado apagado
ärende 'B': apagarComponente(pin8); bryta;
Cuando el switch de KOMP2 esta sv estado encendido
"J" i mål: encenderComponente(pin9); bryta;
Cuando el switch de KOMP2 esta sv estado apagado
fallet 'N': apagarComponente(pin9); bryta;
Cuando el switch de comp3 esta sv estado encendido
"K" i mål: encenderComponente(pin10); bryta;
Cuando el switch de comp3 esta sv estado apagado
fallet är ": apagarComponente(pin10); bryta;
SI la aplicación se pausa por ejemplo al salir de la aplicación o al entrar una llamada apaga los fenor que están conectados en los Pines 5 y 6, y en los Pines 2 y 3
para evitar que estos sigan girando y se tenga FN: s kontroll del proyecto, si quieres apagar algo más solo agrega la línea de código que quieres que se ejecute
fallet "x":
pararMotor (pin5, pin6);
pararMotor (PIN2-, pin3);
bryta;
Metodo de kontroll de velocidad del motor de tracción en el carrito
fallet "V":
IF(Serial.available())
{
char toSend3 = (char)Serial.read();
Bluetooth.Print(toSend3);
Switch(toSend3) {
en basera al valor que recibe es la velocidad que el carrito camina 64 es la más baja y 255 la más alta
ärende '0': modificarVelocidad(64); bryta;
ärende '1': modificarVelocidad(96); bryta;
ärende '2': modificarVelocidad(128); bryta;
ärende '3': modificarVelocidad(172); bryta;
ärende '4': modificarVelocidad(255); bryta;
}
}
bryta;
} //Fin del switch toSend2
} //Fin de om
bryta;
}
void adelante (int Pin1, int Pin2) {
analogWrite(Pin1,LOW);
analogWrite(Pin2,velocidad);
digitalWrite(pin13,HIGH);
}
void reversa (int Pin1, int Pin2) {
analogWrite(Pin1,velocidad);
analogWrite(Pin2,LOW);
digitalWrite(pin13,HIGH);
}
void pararMotor (int Pin1, int Pin2) {
digitalWrite(Pin1,LOW);
digitalWrite(Pin2,LOW);
digitalWrite(pin13,LOW);
}
void modificarVelocidad (int vel) {
Velocidad = vel;
}
void modificarVelocidad2 (int vel) {
velocidad2 = vel;
}
void giro_izquierda (int Pin1, int Pin2) {
digitalWrite(Pin2,LOW);
digitalWrite(Pin1,velocidad2);
digitalWrite(pin13,HIGH);
}
void giro_derecha (int Pin1, int Pin2) {
digitalWrite(Pin2,velocidad2);
digitalWrite(Pin1,LOW);
digitalWrite(pin13,HIGH);
}
void encenderLuz (int Pin) {
digitalWrite(Pin,HIGH);
}
void apagarLuz (int Pin) {
digitalWrite(Pin,LOW);
}
void encenderComponente (int Pin) {
digitalWrite(Pin,HIGH);
}
void apagarComponente (int Pin) {
digitalWrite(Pin,LOW);
}
void encenderPin (int Pin) {
digitalWrite (Pin, hög);
}
void apagarPin (int Pin) {
digitalWrite (Pin, låg);
}

Arduino bil kontrolleras via Bluetooth

Pipe-Bot - en smart arduino bluetooth robot

Magic i verkligheten - en liten bil kontrolleras av Electroencephalogram(EEG)

DIY RC bil kontrolleras med Arduino

Arduino Bluetooth bil kontrolleras av Labview
En annan Arduino fjärrkontroll bil kontrolleras av Android-telefon med Bluetooth-modul

En mycket billig ESP8266 WiFi smart bil kontrolleras av telefon baserad på NodeMCU

RC bil kontrolleras av gamla handske

RC bil kontrolleras av Arduino sensorer - autonoma och lätt att konstruera

Fartyget kontrolleras av bluetooth.

Tal kontrollerade Quadropod

Remote Control bil med Arduino och Bluetooth

Arduino Bluetooth RC bil

Snabba Controlled RC bil med (4 CH Motor Driver styrenhet + Arduino + Bluetooth)

Arduino Android Bluetooth bil

Kontroll Arduino RC bil med android telefon & 1Sheeld

Grundläggande tank-drive robot kontroll över Bluetooth med mbed med Freescale K64F

Robo-Mobile - en hemmagjord Bluetooth Robot
