ACCELOROMETER med adxl 345

Titta på videon här: https://www.youtube.com/watch?v=omZ538TElCU
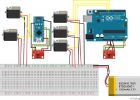
/ * Accelerometer anslutning stift (I2C) till Arduino visas nedan:
Arduino Accelerometer ADXL345 A5 SCL A4 SDA 3.3V CS 3.3V VCC GND GND * /
#include #include
ADXL345 adxl; variabla adxl är en instans av ADXL345 biblioteket
int x, y, z; int rawX, rawY, rawZ; float X, Y, Z; float rollrad, pitchrad; float rolldeg, pitchdeg;
void setup() {Serial.begin(9600); adxl.powerOn();}
void loop() {adxl.readAccel (& x & y, och z); //read accelerometern värden och lagra dem i variablerna x, y, z / / utgång (x, y, z) på horisontalplanet bör vara ungefär (0,0,255) / / följande 3 rader är för en offset rawX = x + 360; rawY = y + 170; rawZ = z + 10. X = rawX/521.00; för beräkningar av vinkel Y = rawY/521.00; för beräkningar av vinkel Z = rawZ/521.00; används för vinkel beräkningar rollrad = atan(Y/sqrt(X*X+Z*Z)); beräknade vinkel i radianer pitchrad = atan(X/sqrt(Y*Y+Z*Z)); beräknade vinkel i radianer rolldeg = 180*(atan(Y/sqrt(X*X+Z*Z))) /PI; beräknade vinkeln i grader pitchdeg = 180*(atan(X/sqrt(Y*Y+Z*Z))) /PI; beräknade vinklar i grader / / skriva ut värden: Serial.print ("x:"); Serial.Print(x); RAW-data utan offset Serial.print ("y"); Serial.Print(y); RAW-data utan offset Serial.print ("z:"); Serial.Print(z); RAW-data utan offset Serial.print ("rawX ="); Serial.Print(rawX); rådata med offset Serial.print ("rawY ="); Serial.Print(rawY); rådata med offset Serial.print ("rawZ ="); Serial.Print(rawZ); rådata med offset Serial.print ("X ="); Serial.Print(X); rådata med offset och delad med 256 Serial.print ("Y ="); Serial.Print(Y); rådata med offset och delad med 256 Serial.print ("Z ="); Serial.Print(Z); rådata med offset och delat med 256
Serial.Print ("\t vinkel enligt x-axeln (Roll(deg)) ="); Serial.Print(rolldeg); beräknade vinkeln i grader Serial.print ("\t vinkel enligt y-axeln (Pitch(deg)) ="); Serial.println(pitchdeg); beräknade vinklar i grader / / Serial.print ("Roll(rad) ="); Serial.Print(rollrad); beräknade vinkeln i radianer / / Serial.print ("Pitch(rad) ="); Serial.Print(pitchrad); beräknade vinkeln i radianer}
Styrda robotarm med gester

Musikinstrument boll

Hur till använda ADXL345 på Raspberry pi

Arduino nano segway

Gränsyta Accelerometer ADXL 335 med Mediatek LinkIt en styrelse

Accelerometer samverkar med Mediatek Linkit en stiger ombord

Analoga vindbommen med Auto ställa in

Skapa en enkel Online-portfölj med en BootStrap mall

Krets planering: Skapa en Dual blinkande LED krets på Protoboard med 555 Timer

Knex Ball maskin litium med instruktioner

Kyckling serveras med en tranbär, port, kanel sås serveras med ugn rostad palsternacka, rödlök & batat frites

Mäta hastigheten på ljud med Arduino microcontroller och ultrasonic sensor

Hur till spår din Robot med OpenCV

Desktop Frisbee Launcher med Wii Nunchuck

Smarta hem med arduino

Fånga rörelse med en Arduino Accelerometer w / XBee Comms
Enkel, enkel och billig DIY stegräknare med Arduino

Etsning glas med roterande verktyg
