Arduino objekt undvikande Robot (2 / 4 steg)
Steg 2: Att bygga





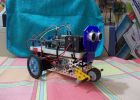
Designen var ganska lätt för mig att besluta om eftersom mina alternativ var begränsade. Använda rutan plast projekt från radioshack, I bifogas lådans lock servo, kastade min Arduino inuti och skruvade på vissa fäste jag hade liggandes till servo för ultrasonic sensor. Jag sätta en strömbrytare på sidan av rutan och körde kablarna från batteriet blocket av RC bil till växeln och sedan till min arduino motor sköld.
Scratch plattan är från en gammal USB post-skala (jag är klar sälja saker på ebay ändå), jag slipat ner sidorna av inringad plast för att passa under motorerna, och med lite superlim, dess hålls på plats riktigt bra.
Strax efter det var alla bestämde sätta ihop och kör jag mig en parallax 5-läges switch. Med detta kan jag flytta ÅRAN manuellt och förbättra funktionerna rörelse.
Actobitty 2 hjul objekt undvikande robot

TurtleDuino objekt undvikande Robot

Undvikande Robot Arduino

Arduino kontrollerade Servo Robot (serbiska)

Infraröd Sensor guidade Arduino kontrollerade L293D Robot (del 2)

Mycket enkelt att skapa Arduino bluetooth spion robot med Android RemoteControl app

Rana: En arduino inspirerade biologiska robot

Arduino kontrollerade L293D Robot (del 1 - Update 1.0)

Arduino självbalanserande Robot

LDRs + Arduino = en enkel robot som kan känna av ljuset!

Enkla objekt undvikande med Arduino

Enkla objekt avoider robot med Actobotics Runt Rover Peewee chassi och en Arduino

Arduino, Mini Sonar Robot

Arduino hinder skatteundandragande Robot (nya Schematisk)

Arduino hinder undvika Robot

Arduino Hexapod Avoider Robot

Arduino ljus efter Robot och undvika

Arduino modulär Robot
