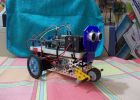
Undvikande Robot Arduino


I marknaden för roboten, det finns gott om smarta undvikande robot kit till salu, men jag gillar inte att köpa färdiga kit, att utveckla gamla rc bil leksaker i förvaringsbox är mer utmaning. Bygga en undvikande robot med hjälp av dess chassi. Installerar mini controller och ultraljud avstånd Sensormodul. Kör dubbla motorer av L298N modul.
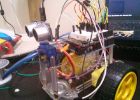
I början använde jag L293D dubbla motordrift IC att köra styrning motor och drivande motor. Det gjorde inte framgång, robot modellen behöver mer elektrisk ström än L293D kan köra, jag har ändrat för att tillämpa L298N drive module som kan driva motorer upp till 2A, det köra robot modellen kraftfullt. Alla mekaniska problem har lösts.
Därefter grundade jag att ultrasonic sensor har timeout problem, det skicka 0 avstånd signal ofta. Roboten kan inte köra ordentligt med denna högljudd signal. Lyckligtvis finns det några smarta killar kan skriva programvara för att eliminera 0 avstånd signal. Roboten kan springa slät utan ofta stanna och vänta på rätt avstånd från ultrasonic sensor.
För att bygga robot på leksak är chassi svårare än med marknaden undvikande robot kit-it har endast två drivna hjul och en gratis roller. Det kan sätta för att undvika hinder inom trånga utrymme, så kontrollera programmet inte komplicera. Den har bara två grova programmering zon-Straight rinnande zon och undvikande zon. Leksak rc bil behöver mer utrymme för svarvning, behöver mer komplicerat och exakt kontroll. Det har fyra exakt programmering zoner långa raka rinnande zon, styrningen kör zon, undvikande zon och återvändsgränd zon (obstruktion).
Ultrasonic avstånd sensorn har en stor nackdel punkt, det kommer att läsa rätt avstånd när reflexionen metar är inom 30 graders. När roboten går till lutande vägg mer än 30 grader. Sensor läser längre avstånd värde än sant avstånd. Det kommer att orsaka en krasch. Vissa uppfinnare lägga till tre sensorer för att åtgärda problemet. Men för detta projekt, bil kroppen är liten, en sensor är nog.
Slutligen, efter att ha arbetat ett par månader att utveckla leksak rc bil vara robotliknande fordonet är möjligt.

Arduino objekt undvikande Robot
Actobitty 2 hjul objekt undvikande robot

TurtleDuino objekt undvikande Robot

Robot Arduino fysiska Etoys Lego Technic 9390

Robot Arduino 4x2 Scratch S4A Map

Enkla objekt undvikande med Arduino

Fönstret måleri Robot (arduino, bearbetning, accelerometer)

Hur man gör ett hinder att undvika Robot Arduino stil

R2D2 ljud på din Robot, Arduino

Autonoma Autonavigation Robot (Arduino)

Rover robot - Arduino och lasercut plywood

"Liten Tank" Robot Arduino/Picaxe/Tamiya plattform

GOduino III - skärbräda-vänlig Arduino-baserad robot controller
Arduino robot i 5 min

Labyrint Problemlösaren Robot, med artificiell intelligens med Arduino

Arduino kontrollerade Servo Robot (serbiska)

Styra din Robot med en Wii Nunchuck (och en Arduino)

Min första Arduino Robot
