Undvikande Robot Arduino (3 / 3 steg)
Steg 3: Programvara för nedladdning och uppladdning till handkontroll
Arduino skiss och bibliotek:
1. Ladda ner bifogad skiss filen .ino och bibliotek zip fil S05RF (denna biblioteksfilen med nya ultrasonic Sensormodul HY-SRF05 men det kan tillämpas på gamla modellen HC-SR04, de sa det skall eliminera 0 högljudd signal och bättre än äldre bibliotekNewPing_v1.7). Lägg till biblioteket i din Arduino saftware.
2. överensstämma och ladda upp .ino skiss till Arduino mini controller. (Denna skiss för Arduino UNO/Nano/Pro Mini 5V / 3.3V)
3. Öppna Arduino seriell övervaka för att se resultatet.
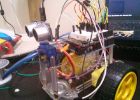
Observera ultrasonic sensor läsa avstånd värdet av varierande olika avstånd att upptäcka. (Denna bifogade skiss Läs i centimeter enhet.) Om det finns några 0 avstånd, är det normalt. Men om det finns många kontinuerlig 0 avstånd, kanske ultraljud sensorn är skadad.
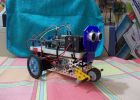
4. Låt oss roboten testet kör på golvet av om obstruktiv objekt runt. Samla alla problem för redigering skissen.
5. hastigheten på två motor kan justeras för att matcha den robot storlek, vikt och batteri makt som du samlat genom att ändra PWM värdet i kommandot analogWrite (enableA, PWM) och analogWrite (enableB, PWM ), från 0 till 255. (i bifogad skiss är 150 för styrning motor och 100 för att köra motor)
För att kalibrera robot hastighet, timing, är lämpligt avstånd zon och drivkraft mycket svårt steg. Det needs2 tid och erfarenhet att köra roboten ordentligt.
Tack till de människor i Arduino spela marken som dela erfarenheter av att lösa många problem tills projektet uppnås.

Arduino objekt undvikande Robot
Actobitty 2 hjul objekt undvikande robot

TurtleDuino objekt undvikande Robot

Robot Arduino fysiska Etoys Lego Technic 9390

Robot Arduino 4x2 Scratch S4A Map

Enkla objekt undvikande med Arduino

Fönstret måleri Robot (arduino, bearbetning, accelerometer)

Hur man gör ett hinder att undvika Robot Arduino stil

R2D2 ljud på din Robot, Arduino

Autonoma Autonavigation Robot (Arduino)

Rover robot - Arduino och lasercut plywood

"Liten Tank" Robot Arduino/Picaxe/Tamiya plattform

GOduino III - skärbräda-vänlig Arduino-baserad robot controller
Arduino robot i 5 min

Labyrint Problemlösaren Robot, med artificiell intelligens med Arduino

Arduino kontrollerade Servo Robot (serbiska)

Styra din Robot med en Wii Nunchuck (och en Arduino)

Min första Arduino Robot
