Arduino passiva preamp med fjärrkontroll, dämparen och channel selector (6 / 7 steg)
Steg 6: kod
Jag förlorade full version av koden och detta är från testfasen men remote fungerar, det behöver bara andra dekoder konfigurerad. Jag kommer att få tillbaka den eller skriva om det asap och belasta upp den här.
Redigera: Jag hittade och laddade upp full version av koden.
Fjärrkontroll
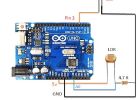
Först importera IRremote bibliotek och initiera det:
#include //import bibliotek innan bland annat från här
byte RECV_PIN = 11;
IRrecv irrecv(RECV_PIN); initiering
decode_results resultat.
Inuti setup()
irrecv.enableIRIn(); Aktivera ir i
inuti loop()
om (irrecv.decode (& resultat)) //this kontrollerar om nya uppgifter kommit
{//inside kolla vad knappen trycktes
om (results.value == 0xCC91D36E) {//volume ner pressad
volcnt-=1; muxWrite(volcnt);
}
annat if (results.value == 0xE936013E) {//volume upp pressade
volcnt + = 1; muxWrite(volcnt);
}
Delay(100); Detta är valfritt det bara saktar ner volymförändring
irrecv.Resume(); vänta på nästa data
}
Roterande pulsgivare
Ingen ytterligare bibliotek behövs för kodare.
Setup
#define ENC_A 8
#define ENC_B 9
#define ENC_PORT PINB
Setup()
pinMode (ENC_A, indata);
pinMode (ENC_B, indata);
Loop()
tmpdata = read_encoder(); läsa nya staten sväng antingen -1 vänster, 0 ingen tur eller 1 rätt vända
om (tmpdata) {volcnt += tmpdata; muxWrite(volcnt);}
Read_encoder()
Jag hittade denna funktion någonstans på nätet
int8_t read_encoder() {
statisk int8_t enc_states [] = {0, - 1,1,0,1,0,0, -1, - 1,0,0,1,0,1,-1,0};
statisk uint8_t old_AB = 0;
old_AB << = 2; kom ihåg tidigare statliga old_AB | = (ENC_PORT & 0x03); Lägg till nuvarande tillstånd avkastning (enc_states [(old_AB & 0x0f)]);
}
Resten av koden är att styra utgångar, bara skriva låg eller hög på stift.
Arduino MIDI-controller med en ZX avstånd och gest Sensor

Arduino RC bil med lång räckvidd och anpassade sändare.

EL Wire hatt: Sekvenserade och ljud aktiverat med fjärrkontroll - drivs med Arduino och Sparkfun

Korrekt flytande nivå Controller med låg kostnad sensor och TV: ns fjärrkontroll för inställningar

Att lägga till Arduino webbaserad OSD knappen fjärrkontroll till kameran SuperCircuits PC165DNR

Arduino RC bil med FPV Camera

Bygga en Arduino Gripper Robot med en DynamixShield.

Blumcaw Cupcake (blinkar, LED, ultraljud, Motorized, kacklande, Arduino, häxa) med 3d tryckta delar

Kontroll Arduino RC bil med android telefon & 1Sheeld

Med hjälp av Arduino SKIFT register med ultraljudssensorer

RUSTIK pall hyllor - med fjärrkontroll LED belysning

Röd färg erkännande baserade Arduino kontroll (med hjälp av MATLAB och Arduino)
Auotmatic Street lights kontroll med hjälp av LDR och Arduino

Skicka SMS från Arduino över Internet med ENC28J60 och Thingspeak

Quiz Game Controller med hjälp av "Ljus och ljud Buzzers" och Arduino

Glödande glas skärvan belagda flaska lampa * 16 färg LED med fjärrkontroll *

Programming "AtTiny85" med den lilla AVR programmerare och kompletteras 'Arduino IDE'

Trådlös utomhus Arduino väderstation med PC loggning och diagram