Arduino Powered autonoma fordon (9 / 12 steg)
Steg 9: Motor & varvtalsreglering


Fordonets hastighet styrs genom pulse wave modulering (PWM) som tillhandahålls av Adafruit Motor sköld. I grund och botten tillåter det oss att tillämpa partiell makt på DC-motor (dvs köra på 25%, 50%, 75%, 100%, etc). För praktiska ändamål, motorn behöver cirka 20% makt bara för att ha tillräckligt vridmoment att övervinna motstånd och få rullande; och för fort av hastigheter fordonet för svårt att styra. Vi definierat ett antal hastigheter som #define uttalanden i programmet, som SPEED_SLOW, SPEED_FAST, SPEED_NORMAL, SPEED_TURN, etc.
Programmets logik anger hastigheten baserat på följande logik:
- Om fordonet kommer raka (inte vrida), och inga föremål upptäcks, gå fort
- Om fordonet kommer rakt och identifierar ett objekt, sakta ner
- Om fordonet vänder (för att undvika och objekt eller bara för att avlyssna en navigering rubrik), sakta ner till "turn speed"
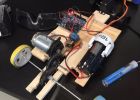
Styrmekanismen har en fjäder som håller styrningen i mittläget när makten inte tillämpas på den styrning motorn; Detta begränsar styrningen till ett hårt vänster eller en hård höger; proportionell styrning är inte möjligt.
På bilden ovan, kan du se (1) bakre hjulet enhet motor och (2) framhjulet styrning motor.

Ett trådlöst kontrollerade, Arduino-Powered anslagstavla

Arduino-Powered binära termometer

Arduino Powered infraröd sak

Arduino Powered uppvärmd handske Liners

Arduino-powered LED klocka

Arduino powered Halloween pumpa med rörelsedetektor

Acrylic fisk Tank med Arduino-Powered mataren

Arduino Powered RGB LED Vodka hylla

Att göra en Arduino Powered gardin Automation

3 kanal arduino Powered Christmas Light Controller!

Solar-orienterade, Arduino-Powered klockan

Arduino Powered raket styrsystemet

Arduino Powered Gainclone (förstärkare)

Arduino powered RC tank

Nattliga utsläpp: Min Arduino Powered Internet aktiverat dröm Generator

Arduino Powered RGB humör lampa plus Simon

Hur man bygger en Arduino Powered Chess spela Robot
Arduino autonoma fordon
