Arduino Powered autonoma fordon (2 / 12 steg)
Steg 2: Fordonets chassi och montering plattform




Jag hade sett inlägg på internet om hacking billig radiostyrda (RC) bilar och direkt ansluta en Arduino på befintliga kretskortet. Jag råkade ha sådan bil runt som min 3 år gamla inte längre spelade med; Det var en $15 Wal-Mart RC bil.
Tyvärr, min tidiga lödning färdigheter lämnade mycket att önska och jag brände genom ett par känsliga ytmontering komponenter, så jag slutade med en delvis fungerande fordon.
Plan B: jag slet ut bilens hela kontrollen ombord och köpte en Adafruit Motor sköld (v2). Problemet löst. Nu hade full kontroll över fordonets motors... om de var ganska grundläggande.
Bilen var kontrollerad av två likströmsmotorer: kontrollerad enheten och med pulse wave modulation (PWM) för den motor controller jag kunde kontrollera hastigheten inom en rad olika hastigheter; den andra kontrolleras styrningen. Denna billiga RC bil hade inte proportionell styrning; vänster och höger hjul är förenade, och det finns en fjäder i mitten som håller hjulen i neutral (mitten) position när DC-motor inte är inkopplad. När motorn är inkopplad, går det till en full/hård sväng vänster eller höger. Som tillät mig att vända fordonet, men ger begränsningar senare när jag vill ha mer sofistikerade navigering. För en framtida förbättring kommer jag försöka ersätta DC-motor med ett servo för full proportionell styrning.
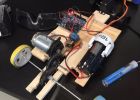
Jag använde en tunn styrelse som monteringsyta som jag bifogade brödunderläggen, Arduino, LCD, etc. Jag placerade batteri leveranser under styrelsen och passerade kablarna genom hål jag borrat.
I den första bilden ovan ser du (1) LCD, (2) den huvudsakliga bakbord, (3) lilla bakbord för magnetometer, (4) Arduino (du ser den GPS sköld som du tittar ner) och (5) magnetometer sitter högt på sin pole monterade abborre upp.

Ett trådlöst kontrollerade, Arduino-Powered anslagstavla

Arduino-Powered binära termometer

Arduino Powered infraröd sak

Arduino Powered uppvärmd handske Liners

Arduino-powered LED klocka

Arduino powered Halloween pumpa med rörelsedetektor

Acrylic fisk Tank med Arduino-Powered mataren

Arduino Powered RGB LED Vodka hylla

Att göra en Arduino Powered gardin Automation

3 kanal arduino Powered Christmas Light Controller!

Solar-orienterade, Arduino-Powered klockan

Arduino Powered raket styrsystemet

Arduino Powered Gainclone (förstärkare)

Arduino powered RC tank

Nattliga utsläpp: Min Arduino Powered Internet aktiverat dröm Generator

Arduino Powered RGB humör lampa plus Simon

Hur man bygger en Arduino Powered Chess spela Robot
Arduino autonoma fordon
