Arduino Powered autonoma fordon (7 / 12 steg)
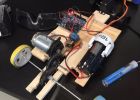
Steg 7: GPS-navigering


Vi använder GPS för att svara på grundläggande frågan "Där är vi just nu?" Eftersom vi waypoints är kända konstanter, med den nuvarande lokal informationen vi kan sedan räkna ut avståndet och jaga till den aktuella waypointen.
Jag använde den utmärkta Adafruit yttersta GPS sköld för GPS. Jag var mycket imponerad av denna enhet. Min verkstad ligger i huset i en sovrummet på övervåningen där jag väntade inte mig att få en GPS-signal alls. Till min förvåning kunde jag få en god kvalitet fix med 8-10 satelliter! Förvärv tiden var otroligt snabbt... några sekunder, och mycket snabbare än min dyra TomTom bil baserad GPS. Obs: eftersom GPS skölden var högst upp på min bil, jag sparade pengar genom att inte köpa separat antenn montering och istället bara använde inbyggt antennen... det fungerade bra.
Jag använde Adafruit GPS bibliotek, främst på grund av bra exempelkod som tillät GPS läsning för att inträffa i ett avbrott rutinmässigt. som verkligen befriade upp resten av min kod så att tidpunkten var inte längre ett problem.
Jag lånade koden från TinyGPS bibliotek för att skapa funktioner för att beräkna avståndet till waypointen och kurs till waypoint.

Ett trådlöst kontrollerade, Arduino-Powered anslagstavla

Arduino-Powered binära termometer

Arduino Powered infraröd sak

Arduino Powered uppvärmd handske Liners

Arduino-powered LED klocka

Arduino powered Halloween pumpa med rörelsedetektor

Acrylic fisk Tank med Arduino-Powered mataren

Arduino Powered RGB LED Vodka hylla

Att göra en Arduino Powered gardin Automation

3 kanal arduino Powered Christmas Light Controller!

Solar-orienterade, Arduino-Powered klockan

Arduino Powered raket styrsystemet

Arduino Powered Gainclone (förstärkare)

Arduino powered RC tank

Nattliga utsläpp: Min Arduino Powered Internet aktiverat dröm Generator

Arduino Powered RGB humör lampa plus Simon

Hur man bygger en Arduino Powered Chess spela Robot
Arduino autonoma fordon
