Arduino Stepper Motors (3 / 4 steg)
Steg 3: Kod uppdelning
Kod deklarerar en stegmotor, väljer en hastighet och gör det förvandlas i båda riktningarna.
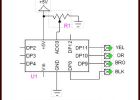
Här förklarar vi stegmotor. Syntaxen måste antalet steg av motorn som den första parametern och sedan stiften som vi ansluten till motorn. Vi behöver bara deklarera två riktning stiften på Arduino Motor Shield. Riktningen stift uppsättningar vilken riktning spolarna kommer att vara glada i:
Stepper stepper1 (200, dirA, dirB);
I en normal DC motor drift av Motor skölden Välj två PWM stift hur mycket kraft vi tillskriver varje motor. Eftersom detta är en stepper, ha vi dock alltid full effekt; så vi kommer att förenkla och direkt sätta PWM stift alltid så hög:
PWM stift kräver förklaring när det används som Digital < br > pinMode (pwmA, produktionen);
pinMode (pwmB, produktionen);
Ange PWM stift som alltid hög
digitalWrite (pwmA, hög);
digitalWrite (pwmB, hög);
Ett annat viktigt steg är att förklara den hastighet vid vilken vi vill motorn att stänga. Om, till exempel, vi satt en hastighet av 60 RPM som i detta fall, och motorn har 200 steg, tar omkring 5 millisekunder för att öka ett steg. Hastigheten på motorn kan ändras när som helst.
stepper1.setSpeed(60);
Slutligen för att göra motor flytten, behöver vi beställa ett antal steg att öka. Om vi matar ett negativt antal steg, kommer det röra sig i motsatt riktning. Observera att funktionen step() Pausar körning av programmet tills motorn snurrar helt. Om exempelvis ställer vi 200 steg med en hastighet av 1 RPM, tar det en hel minut tills Arduino kommer att fortsätta körningen.
stepper1.Step(-100);
Arduino förutsätter stepper rör sig medan det beställer det att flytta. Genom
har ingen feedback krets, så om vi håller med skaft av motorn, Arduino kommer att tro det är i rörelse om nummerlistan inte är rörliga.

Arduino + Stepper Motor kamera reglaget
Arduino Stepper Motor Control
Arduino stepper motor och servon shield - AW GCSE styrelsen

Arduino bibliotek för 28BYJ-48 Stepper Motor och ULN2003 Driver

Arduino 6 tråd Stepper Motor handledning

Jorden världen roterar med Arduino eller Raspberry Pi kontrollerade Stepper Motor

Enkla Stepper Motor Driver för Arduino CNC projekt

PIR-SENSOR med ARDUINO aktivera STEPPER MOTOR

Bi Polar Stepper Motor med L293D och Arduino

KONTROLL STEPPER MOTOR hastighet med LABVIEW och ARDUINO

Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino

Dansar Tippy med arduino och stepper motor

Arduino/Android BLUETOOTH - 28BYJ 48 Stepper Motor gardin kontroll APP

ARDUINO UNO + TB6560 Stepper motor driver

Kör en Stepper Motor med en Arduino och en A4988 Stepstick/Pololu drivrutin

Arduino hårdvara PWM för stepper motor enheter

28BYJ-48 Stepper Motor Control System baserat på Arduino med ULN2003 Chip

Arduino ljus känsliga Stepper Motor
