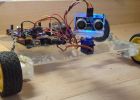
AUTONOMA hinder AVOIDER (5 / 5 steg)
Steg 5: PROGRAM:-
CONST int loopPeriod = 20;
osignerade långa loopdelay = 0;
CONST int sensor = 12. ARDUINO UTGÅNGSSTIFTET FÖR SENSOR INPUT/OUTPUT
CONST int bp1 = 7. ARDUINO UTGÅNGSSTIFTET FÖR MOTOR INGÅNGAR
CONST int bp2 = 8. ARDUINO UTGÅNGSSTIFTET FÖR MOTOR INGÅNGAR
CONST int bp3 = 4; ARDUINO UTGÅNGSSTIFTET FÖR MOTOR INGÅNGAR
CONST int bp4 = 2; ARDUINO UTGÅNGSSTIFTET FÖR MOTOR INGÅNGAR
int ultraDistance;
int ultraDuration;
void setup()
{
Serial.BEGIN(9600);
pinMode (bp1, produktionen);
pinMode (bp2, produktionen);
pinMode (bp3, produktionen);
pinMode (bp4, produktionen);
}
void loop()
{
IF(Millis() - loopdelay > = loopPeriod)
{
readUltrasonicSensors();
motorstate();
loopdelay = millis();
}
}
void readUltrasonicSensors()
{
pinMode (sensor, produktionen);
digitalWrite (sensor, låg);
Delay(2);
digitalWrite (sensor, hög);
delayMicroseconds(10);
digitalWrite (sensor, låg);
pinMode (sensor, ingång);
ultraDuration = pulseIn (sensor, hög);
ultraDistance = (ultraDuration/2) / 29;
}
void motorstate() / / MOTORSTYRNING funktion
{
om ((ultraDistance > 15) || (ultraDistance < 0))
{
digitalWrite (bp3, låg);
digitalWrite (bp1, hög);
digitalWrite (bp2, hög);
digitalWrite (bp4, låg);
}
annat
{
digitalWrite (bp1, hög);
digitalWrite (bp2, låg);
digitalWrite (bp3, låg);
digitalWrite (bp4, hög);
}
}

Hinder avoider med hjälp av IR-sensor

Arduino hinder avoider robot [EASY!]

DTMF-baserade hinder AVOIDER ROBOT

Hinder Avoider med HC-SR04 Ultrasonic Sensor

Hinder Avoider Robot använder Arduino Uno och IR-närhet Sensor

Leksak att hinder Avoider

Hinder Avoider Robot använder Relay Board

MultiTasking Robot

Trådlös, hinder upptäcka, pipa roboten med Arduinos!

Hinder undvika Robot använder Arduino

Arduino Hexapod (med en personlighet)

Hur du ansluter Liquid Crystal Display(LCD) till Arduino

Svärm Bots: Montering och kooperativa Transport

Bumbley - lilla servo roboten

Hur jag gjorde en robot-D.S. (detaljerade steg för steg)

ROAMING ROBOT
Scout v1.0

Enkla multi-mode 4wd Rover JR-001
