Bilen kontrollerade med PS3-handkontrollen (5 / 5 steg)
Steg 5: Big Finale: upphakning arduino till bilen
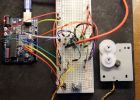
Så är varje bil olika. I mitt projekt, jag hade en mycket enkel bil, med endast fyra kontroll alternativ (framåt, bakåt, vänster, höger) och alla dessa tillåts endast ett värde, dvs det var bara en tillåten acceleration. Så skapa kod därefter. Jag använde bara riktningsknapparna på handkontrollen eftersom jag tänkte att det skulle vara enklast. Det är också möjligt att använda accelerometrar för svarvning, styrspakar för framöver, etc. I princip kan du välja vilken kontroll konfiguration du vill. Jag kommer att förklara hur man gör detta inom kort.Men nu måste vi till krok upp arduino till bilen. Min bil hade två motorer. En i ryggen att gå framåt och bakåt, och en främre till drivhjulen. Du måste bestämma hur dessa motorer fungerar. Om de är som min, de kommer att ha två trådar anslutna och du vill ta bort dem och löda kablarna från utgångarna av arduino på dem. Om din bil är olika, kommer inte väl förhoppningsvis det vara alltför svårt att räkna ut.
Nu när vi har wired arduino på bilen, måste vi göra kod att berätta bilen att göra. Som jag nämnde ovan, varierar detta på både dina preferenser, och den enskilda bilen. Så nu kommer jag att presentera en massa kod som blir bra oavsett hur situationen är. Först vill, vi att metoder att läsa knappen ingångarna. Vi kan använda följande:
#define buSelect 0
#define buLAnalog 1
#define buRAnalog 2
#define buStart 3
#define buUp 4
#define buRight 5
#define buDown 6
#define buLeft 7
#define buL2 8
#define buR2 9
#define buL1 10
#define buR1 11
#define buTriangle 12
#define buCircle 13
#define buCross 14
#define buSquare 15
#define buPS 16
Detta returnerar sant om den angivna knappen trycks. Så för min använde jag buUp, buDown, etc.
Om du vill vara finare, och kanske har en uppsättning indatavärden så du kan ha mer än en kraft av acceleration, kan du använda accelerometrar. Dessa är deras metoder:
#define AccelerometerX 0
#define accelerometerY 1
#define AccelerometerZ 2
#define GyrometerZ 3
Värdena för dessa gå från 0 till 1023, med 512 att vara neutral
I alla fall, när du gör det måste du bara berätta arduino att ge utdata på den önskad effekt, och bilen kommer att gå!
Hoppas du har haft denna lilla projekt.

Med PS3-handkontrollen på pc(32-bit)

Styra datorn med en PS3-handkontrollen med Muller - SixAxis eller DualShock

Hur man spelar din PSP Go med en PS3-handkontrollen

Hur du ansluter din PS3-handkontrollen till din dator

Xbox 360 controller mod med PS3 stick kuddar och flyttade knappar

Roboten drivs av PS3-handkontrollen genom Arduino och Wifi sköld

Använda PS3-handkontrollen som PC game controller

PS3-handkontrollen dekorerad med en Iron Man Dr.Pepper kan.

Bilen skydd med snöbollar

PS3-Handkontrollen dockningsstation

Flytta demontering en PS3-handkontrollen

LED är kontrollerade med C#-program och Arduino

Mobil robot kontrollerad med bluetooth
ARDUINO stegmotor kontrollerad med rotationsencoder och l293d eller SN754410NE chip

Julgran med LED och musik, kontrollerade med Arduino

Ännu en annan Exploration Rover web-kontrollerade (med Raspberry Pi och Arduino. Android, Iphone, PC, MAC compatible)

Hur sprayfärg en PS3-handkontrollen!

Remote Raspberry Pi Robot (PS3 Controller) - Fablab NerveCentre
