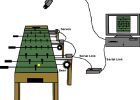
Bordsskiva fotbollsspel (7 / 9 steg)
Steg 7: Arduino kod
DEFINIERAinput (stift)
#define sensor1 5 / / sensorn på målvakten vänster
#define sensor2 0 / / sensor målvakt höger
#define centrum 8
#define motor1 10
#define motor2 11
#define distThresh 50
GLOBALA variabeldeklarationer
int s1Baseline;
int s1Tolerance;
CONST int numRecRead = 10;
int recReading [numRecRead];
int recReadCur;
Ogiltiga inställningar () {
Serial.BEGIN(9600); Ställ in följetong bibliotek på 9600 bps
pinMode (sensor1, ingång);
pinMode (motor1, produktionen);
pinMode (motor2, produktionen);
resetRecVal();
utsäde slumptalsgeneratorn för svårigheten
randomSeed(analogRead(0));
Kalibrerar sensorer och ange originalplan och toleranser
int s1Cal [2];
calibrateSensor (sensor1, s1Cal);
s1Baseline = s1Cal [0];
s1Tolerance = s1Cal [1];
}
void loop() {
int s1Val, s1ValAvg;
dubbla s1Dist;
Serial.println(digitalRead(Center));
Får sensorn värden
s1Val = checkSensor (sensor1, s1Baseline, s1Tolerance);
s1ValAvg = averageReading(s1Val);
Serial.println(s1Val);
om (s1ValAvg > distThresh) {
s1Dist = sensorToDistance(s1Val);
om (s1Dist < 14) moveGoalie(5); flytta höger
annars om (s1Dist > 18 & & s1Dist < 32) moveGoalie(-5); flytta åt vänster
resetRecVal();
}
}
Returnerar värdet sensor om det fanns en behandling (dvs bollen passerat infront)
eller 0,0 om inte behandlingen togs (dvs bollen klarade inte)
sensorPin - pin av sensorn som ska kontrolleras
Originalplan - att sensorer "ingen läsning" värde
tolerans - tröskeln av baslinjen som bör anses vara en behandling
(dvs. om värdet ligger inom (originalplan +/-tröskel rapporterar inte
en läsning)
int checkSensor (int sensorPin, dubbel baslinje, dubbel tolerans) {
dubbel sVal = analogRead(sensorPin); Värde som rapporterats av sensorn
om (abs (baslinje - sVal) < tolerans) / / om läsning är inom toleransen
Return 0; returnera "ingen läsning"
returnera sVal; annars returnera värdet
}
Returnerar avståndet motsvarar den sensor behandlingen
sensorVal - värdet läsa av sensorn
dubbla sensorToDistance (int sensorVal) {
dubbel skala = 2050.
dubbel expon = 1,0/0,85;
dubbel dist = pow((scale/sensorVal), expon);
om (dist > 35) dist = 35. //normalize dist
returnera dist;
}
Kalibrerar sensorn (springa setup)
Tar kalibreringspunkter från sensorn för att hitta medelvärdet
och brus i sensormätningar
sensorPin - Pin av sensor kalibrera
calData - int [] för värdena kunna lagras i
void calibrateSensor (int sensorPin, int calData[]) {
int numReadings = 300; ta 300 kalibreringspunkter
int data [numReadings]; används för att lagra kalibreringsmönstret poäng
int i;
int minVal = 10000; initiera minimivärdet hög
int maxVal = -1; initiera högsta värde låg
för (jag = 0; jag < numReadings; ++ jag) {
int t = analogRead(sensorPin); Läs exempeldata
data [i] = t; fylla i data array
Spela in min och max sensormätningar
om (t < minVal) //if t är mindre än nuvarande minVal
minVal = t; ersätta minVal
om (t > maxVal) //if t är större än maxVal
maxVal = t; ersätta maxVal
}
Hitta spridningen av data
int sprida = maxVal - minVal;
Hitta medelvärdet av exempeldata
dubbel medelvärde = 0;
för (jag = 0; jag < numReadings; ++ jag)
menar += data [i];
menar / = numReadings;
beräkna STDAV
dubbel stddev = 0;
för (jag = 0; jag < numReadings; ++ jag)
StdDev += pow ((data [i] - menar), 2);
StdDev = numReadings;
StdDev = sqrt(stddev);
återkomst [menar, sprida]
calData [0] = medelvärde;
calData [1] = stddev * 2;
hemkomst.
}
0-stop
10 - snabb
< 0 har lämnat
> 0 rätt
void moveGoalie (int dir) {
int mag = map(abs(dir), 0, 10, 0, 255);
int retMag = karta (abs ((dir + 4)/4.0), 4, 14, 100, 255); returnera långsammare
om (dir > 0) {
analogWrite (motor1, mag);
analogWrite (motor2, 0);
Delay(100);
analogWrite (motor1, 0);
analogWrite (motor2, 0);
Delay(1000);
analogWrite (motor1, 0);
analogWrite (motor2, retMag);
Delay(200);
}
annars om (dir < 0) {
analogWrite (motor1, 0);
analogWrite (motor2, mag);
Delay(300);
analogWrite (motor1, 0);
analogWrite (motor2, 0);
Delay(1000);
analogWrite (motor1, retMag);
analogWrite (motor2, 0);
Delay(300);
}
stoppa målvakten
analogWrite (motor1, 0);
analogWrite (motor2, 0);
}
int averageReading (int newVal) {
recReadCur % = (numRecRead - 1);
recReading [recReadCur ++] = newVal;
int summa = 0;
int giltiga = 0;
för (int jag = 0; jag < numRecRead; ++ jag) {
om (recReading [i] > 0) ++ giltiga.
summa += recReading [i];
}
om (giltig < 7) return 0;
tillbaka (summan/giltig);
}
void resetRecVal () {
för (int jag = 0; jag < numRecRead; ++ jag) //initialize recRead
recReading [i] = 0;
recReadCur = 0;
}
Autonoma fotbollsspel

Fotbollsspel uppgradering

Lägg till sidan bollen returnerar din Halex/Franklin fotbollsspel

Bordsskiva bänk och ssedan vice

Bordsskiva vävning

Själv nollställningsbar bordsskiva bowlingspel (D4E1)

Hur man byter en trasig glas uteplats bordsskiva (utan glas!)

Disco julgran bordsskiva dekoration

Göra billiga bordsskiva LED Mood ljus (förbättrad)

Bordsskiva av trä byggsten

Fastställande kanten av en flisas marmor bordsskiva med sugru

Sea glas mosaik bordsskiva

Skiffer bordsskiva fontän

Hur till sätta fast en klassiska amerikanska AM bordsskiva tube radio

Bordsskiva LED Timer

Bordsskiva fontän

Hur man gör ett bordsskiva Rpg spel

Makedo kartong fotbollsspel
