Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi (10 / 15 steg)
Steg 10: Houeston, har vi haft problem... DC-motorer är inte samma modell.
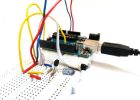
Jag har redan testat H-bron och det fungerar bra, men när jag koppla motorerna fick jag från robot plattform jag beställde på nätet dessa två motorer sväng vid olika hastigheter och göra olika ljud. Jag ändrade spjäll till 100% på motorerna. Båda av dem kunde inte köra på deras maximala kapacitet.
Det verkar som detta är två olika motorer. Man har ett större vridmoment vilket är bra för denna typ av robot men de andra bara inte skulle flytta roboten. Så visar det i cirklar.
Vid denna punkt, är vad jag har den seriella programmet på Arduino fungerar helt bra men den Tcp servern på datorn och Tcp klienten på Pi inte kodas ännu. Jag måste avsluta detta inlägg för konkurrens. Vad gör jag?
- Det första tredubbla jag spänningen för motorerna. Databladet sa 3V, 6V flytta inte dem. Det är 9V sedan. Jag kopplade teo batterier parallellt att dubbla strömmen och spänningen förblir densamma.
- Jag har andra motorer som passar till mount på plattformen? Kanske kan jag se om de är liknande modeller.
- Jag kan byta ut till servon om chokladen verkligen träffa fläkten.
Skolan började. Jag måste se vad man ska göra.
Obs: Varför i hela friden skriver jag problem jag möter här? Så om du är mindre erfarna och har samma problem vet för du vad du ska göra.
Lösningen:
Så har jag gjort ett annat test. Jag har anpassat Skillnaden i hastighet i Arduino koden.
Obs: motorerna kan snurra i olika hastigheter för dig! Ändra värdena i den Arduino skissen.

Avlägsen kontrollerade robot med Arduino och T.V. remote

Gest kontroll car(robot) med Arduino och Android(bluetooth)

2WD röst kontrollerat Robot med Arduino och BitVoicer Server

Kontrollera en Roomba robot med Arduino och Android

Bygga en semi Smart, DIY båt med Arduino och några andra sensorer

Realtid ansikte spårning Robot med Arduino och Matlab

Gör din vägande klättra hacka med arduino och hx711
Läs/emulera fjärrkontroller med Arduino och Raspberry Pi

Piano trappor med Arduino och Raspberry Pi

Grundläggande raden efter Robot med Arduino

Arduino Uno och Visuino: kontrollera Smart Car Robot med Joystick och L298N motorn förarens

Styra din Tv, Dvd och ljud system med Arduino och Android

Multiplexering med Arduino och 74HC595

Hur man har kul med Arduino (och bli en nörd i processen)

Roligt spel med arduino och bearbetning

Mugg musik: Förvandla vatten till ett Instrument med Arduino och ChucK

Säkerhetssystem och tillgång kontroll med Arduino och RFID-

Spela upp ljud på dator med arduino och progduino
