DIY CNC router - klassprojekt (2 / 7 steg)
Steg 2: Elektronik
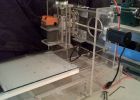
Efter läst igenom andra CNC bygga Instructables och forum (t.ex. CNCZONE.com), och be vänner med egna maskiner, jag fast på en elektronik paket som innehåller fyra NEMA 34 1841 oz/i stegmotorer, fyra stepper motor förare, och fyra nätaggregat, en per motor. Detta paket på gång (våren ' 16) kostar $540,00 plus frakt och hantering.
Jag visste att jag kunde använda min Arduino Uno för att kontrollera dessa motorer på ett enkelt sätt. (Inte via någon form av design mjukvara, men bara genom direkt Arduino pin kontroll, eller användning av Arduino "Stepper Library.") Så när jag packat upp allt ställa jag om ledningar det tillsammans att se dessa motorer väcks till liv.
Jag fick livet ur motorerna omedelbart och var mycket glada över det ett kortlivat ögonblick. Men när jag spelade med dem och Arduino koden lite mer, jag upptäckte att jag inte var få någon form av stadig, förnuftiga rörelse av mina motorer.
Detta visade sig vara ett problem med inställningarna för (Leadshine MA860H) stepper föraren. Var och en av mina fyra stepper drivrutiner kom utrustad med 10 DIP-switchar som tillåter användaren att ändra microstepping av drivrutinen. För min första testerna, hade jag lämnat drivrutinerna i fabriksinställningen, som kräver den högsta upplösningen, det vill säga, det största antalet steg per rotation. Efter forskning på stegmotorer beter sig oförutsägbart på denna setup, upptäckte jag Arduino som processorn kan bara hantera ett visst antal steg per rotation, som om det överskrids, resultaten blivit oberäkneligt. Härifrån bytte jag bara genom alla drivrutinsinställningar start från den högsta revolutionen och arbeta min väg ner, tills jag hittade den högsta upplösningen som skördats förnuftiga åtgärder från motorerna. För min motorer och drivrutiner slutade detta att vara en inställning av pulser per varv.
När jag knäckt förvaltningskodexen DIP-switch, motorerna betedde sig som förväntat, men de var fortfarande inte kontrolleras för design eller mekanisk effekt. Jag visste det var PC baserat program jag kunde kontrollera en CNC setup med, till exempel Mach3, och att jag skulle få denna aspekt av det fungerar oavsett vad, så jag fokuserade därefter på vad verkade det största hindret för mig - en stabil och exakt mekanisk bygga.

DIY CNC Router
DIY CNC Router planer: Hur man bygger

Hemgjord X Y Z axel bild för DIY CNC Router fräsning

Hemmabyggd (DIY) CNC router - baserade Arduino (GRBL)

DIY gitarr med min diy cnc router

DIY grov CNC router?

Aluminium cnc router
Hemgjord X Y Z axel glida av aluminiumlegering för DIY-Laser 3D-skrivare CNC Router fräsmaskin
Hemgjord X Y Z axel bild av Aluminium för DIY-Laser 3D-skrivare CNC Router Mill maskin
Hemgjord trä metall Mini svarv Collet ER11 DIY Spindelhuset Chuck spindel dubbdockan CNC Router fräsning
Hemgjord trä metall Mini svarv Collet ER11 DIY Spindelhuset Chuck spindel dubbdockan bild CNC Router
Hemgjord Mini cirkulär tabell Jig såg DIY spindel dubbdockan Skjut CNC Router vedhuggning PCB aluminiumlegering
Hemgjord Mini cirkulär tabell Jig såg DIY spindel dubbdockan bild CNC Router vedhuggning PCB Spindelhuset Chuck
3 axel CNC Router - 60 "x 60"x5"- JunkBot

P9L - Lounge stol gjord med CNC Router

P9C - stol gjord med CNC Router

P9S - pall gjord med CNC Router
DIY CNC grafik cutter hacka
