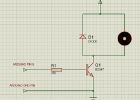
Dubbla Motor Driver med Arduino använder en SN754410NE Quad halv H-bro (3 / 3 steg)
Steg 3: Arduino skiss

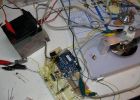
Använd denna kod för att testa din motor med Arduino styrelsen:
Om du behöver PWM, bara använda PWM utgångar på Arduino
och istället för digitalWrite, bör du använda kommandot analogWrite
// ————————————————————————— Motors
int motor_left [] = {2, 3};
int motor_right [] = {7, 8};
int ledPin = 13. LED är ansluten till digital stift 13
// ————————————————————————— Setup
void setup() {
Serial.BEGIN(9600);
Installationsprogrammet för motorer
int i;
för (jag = 0; jag < 2; i ++) {
pinMode (motor_left [i], produktionen);
pinMode (motor_right [i], produktionen);
pinMode (ledPin, produktionen);
}
}
// ————————————————————————— Loop
void loop() {
drive_forward();
Delay(1000);
motor_stop();
Serial.println("1");
drive_backward();
Delay(1000);
motor_stop();
Serial.println("2");
turn_left();
Delay(1000);
motor_stop();
Serial.println("3");
turn_right();
Delay(1000);
motor_stop();
Serial.println("4");
motor_stop();
Delay(1000);
motor_stop();
Serial.println("5");
digitalWrite (ledPin, hög); ställa in lysdioden på
Delay(1000); vänta en sekund
digitalWrite (ledPin, låg); iväg för LED
Delay(1000); vänta en sekund
}
// ————————————————————————— Drive
void motor_stop() {
digitalWrite (motor_left [0], låg);
digitalWrite (motor_left [1], låg);
digitalWrite (motor_right [0], låg);
digitalWrite (motor_right [1], låg);
Delay(25);
}
void drive_forward() {
digitalWrite (motor_left [0], hög);
digitalWrite (motor_left [1], låg);
digitalWrite (motor_right [0], hög);
digitalWrite (motor_right [1], låg);
}
void drive_backward() {
digitalWrite (motor_left [0], låg);
digitalWrite (motor_left [1], hög);
digitalWrite (motor_right [0], låg);
digitalWrite (motor_right [1], hög);
}
void turn_left() {
digitalWrite (motor_left [0], låg);
digitalWrite (motor_left [1], hög);
digitalWrite (motor_right [0], hög);
digitalWrite (motor_right [1], låg);
}
void turn_right() {
digitalWrite (motor_left [0], hög);
digitalWrite (motor_left [1], låg);
digitalWrite (motor_right [0], låg);
digitalWrite (motor_right [1], hög);
}

Kör motorn med android använder arduino och bluetooth

Skicka sensordata (DHT11 & BMP180) till ThingSpeak med en Arduino, använder ENC28J60 Ethercard

Motor Driver med 555 Timer IC

Snabba Controlled RC bil med (4 CH Motor Driver styrenhet + Arduino + Bluetooth)
Snabba kontroll av dc-motor från laptop använder arduino och bearbetning

Spela ljud med Intel Edison och Arduino använder en Bluetooth-högtalare
BLDC Motor Control med Arduino, bärgades HD motor och hallgivare

EL Wire hatt: Sekvenserade och ljud aktiverat med fjärrkontroll - drivs med Arduino och Sparkfun

Blink för ESP8266 native, som arduino använder Windows

Utlöser IFTTT från Arduino använder Lithouse

Hur du tweet från en Arduino använder wifi sheild

Styra Arduino använder android app

Rotational input från Arduino använder LDR (light-dependent resistor) till enhet

Hur man kör en borstlös motor ESC med Arduino
Plottning och grafritande realtidsdata från Arduino använder kraften i Python

IoT din Arduino använder bluetooth och Android smart phone (MQTT tjudra)

3 sätt om hur du uppdaterar en stinkande hundar päls med saker använder du varje dag.

Arduino använder NRF24L01 Rf modul
