En Arduino infraröd kontrolleras och hinder skatteundandragande Robot (4 / 10 steg)
Steg 4: Hacka Servo för kontinuerlig rotation








Filer: http://bit.ly/1sYiuDD
Ett servo kan bara rotera mellan 0 och 180 grader. Vi vill våra två servon att fungera som hjul, bör de hålla roterande på 360 grader. Idén om den här hacka är att göra servon rotera vid en given hastighet och också sluta använda dina koder i Arduino.
-Mellan värdena 0 och 89 grader bör din servon rotera medsols med 0 är den högsta hastigheten och 89 att vara den långsammaste
-På värdet av 90 stannar servo och,
-Mellan värdena för 91 och 180 grader ska din servon Rotera moturs med 180 högsta hastighet och 91 att vara den långsammaste.
Följ någon av de 2 alternativ till hacka din servon:
1: Titta på denna Youtube video på hur till hacka din servo: https://www.youtube.com/watch?v=SK8mhnEzcvY
Video förklarade:
Efter upplösningen servo, skivning ett litet utrymme till potentiometern och expanderande hålet i servo redskap som visas i videon och bilderna ovan.
I mappen: > koder, ladda ner/öppna mappen >Servo_Con_1 och läsa in Servo_Con_1.ino. Ladda upp den till din nano.
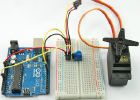
Nu ansluta servo som illustreras i schematiskt. (kolla databladet för din servo så att du ansluta rätt tråd till rätt ställe). Vanligtvis den svarta kabeln är marken ;::; vit eller orange tråd till PWM stift (pin 9 till exempel) och ;::; röda tråd till 5v
Anslut din arduino uno till enheten och ladda upp koden. Servo ska börja rotera
Nu rotera potentiometer med en skruvmejsel tills servo slutar rotera, justera tills det inte rycka och stannar roterande helt.
Efter att få till den punkt där den stannar ryckningar och roterande, limma ner potentiometern att undvika det från att flytta efter montering det. Problemet jag hade med detta var att limmet inte skulle hålla ner, så jag högg av huvudet av potentiometern. Se andra metoden, om du har problem med detta, eller om inte hoppa till felsökning.
Eller
2: Om efter montering, motorn börjar rotera eller rycka, föreslår jag att du något hugga av potentiometer, så att redskap som inte roterar potentiometern när servo börjar rotera. Använd en vass kant kniv för att justera potentiometer om det behövs tills det slutar roterande och ryckningar.
Obs: Kontrollera att din servo är fortfarande ansluten till din arduino när du justerar potentiometer.
Felsökning:
I mappen filen: > koder, ladda ner/öppna mappen > Servo_Con_2 och ladda Servo_Con_2.ino. Ladda upp den till din nano.
Köra och din servo bör följa en sekvens av stopp, medurs rotation, anti Medsols rotation...
Om inte kontrollera anslutningen igen eller prova justera potentiometer

Arduino hinder skatteundandragande Robot (nya Schematisk)

BASIC ARDUINO hinder SKATTEUNDANDRAGANDE ROBOT

Hinder undvika Robot använder Arduino

DIY autonoma linje spårning med hinder undvika Robot (Rover)

Arduino Nano: IR hinder skatteundandragande Sensor med Visuino

Hinder Avoider Robot använder Arduino Uno och IR-närhet Sensor

Android Arduino Bluetooth HC-05 - kontrollera Arduino över röst och knappar i App

Ännu en annan linje följande / hinder skatteundandragande 2WD bil

HINDER SKATTEUNDANDRAGANDE med KY-032

Kör två Nixie rör med en Arduino via ett skiftregister och två SN74141s.

Distansera mätningen och hinder detektering med NXP 89v51rd2fn och ultrasonic sensor HC-SR04.

Lägga till Bluetooth 4.0 till din Arduino projekt [IoT] - kontrolleras av Smartphone

Kodgenerator för anpassade Android/Arduino menyer att slå Arduino utgångar på och av. Android/Arduino för nybörjare. Absolut ingen programmering krävs

Hemautomation med Arduino... Och JavaScript!

Laptop automatisk Start/stopp anklagat för (med Arduino, Yun sköld och ESP8266)

Hur du byter en Arduino utgång på och bort från din Android mobil. Arduino för nybörjare
ARDUINO: Servo vinkel kontrolleras av potentiometer

Arduino hinder undvika Robot
