En enkel och billig DIY raden efter robot (1 / 6 steg)
Steg 1: Hur fungerar det?

Vad är en linje efter robot?
Som namnet antyder denna robot kommer att följa en linje antingen svart eller vit linje.
Vad är logiken bakom detta?
Denna robot följer logiken i ogenomskinliga och öppen yta, vanligtvis vit yta reflekterar tillbaka ljuset och svarta ytan absorberar ljuset,
Hur denna logik kan användas i raden efter robot?
Vi kan använda en IR-sensor, dess ett par IR-sändare och sändare, IR strålar avger sändaren och emot av mottagaren, om ytan oftast vita eller annan färg kommer att spegla tillbaka givaren och mottagaren börja mottagare av detta sätt sensor producera 5v som utgång, denna utgång kan anslutas till någon logik krets drivmotor eller annan apparat , Om sensorn möter svarta ytan finns ingen reflekterade strålar, så logiken ljudutgången är 0v.
Detta är en enkel och billig linje efter robot, denna robot behöver inte någon programmering och kan arbeta utan en mikrokontroller, därför detta är en robot för en nybörjare,
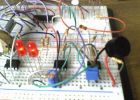
Huvudkomponenterna i denna robot är IR-sensorn och ULN 2003A IC
När IR-sensorn faller på en reflekterande yta yta eller vita det börjar att ge 5v som utgång. ULN 2003A är en hög spänning, hög-aktuell, darlington transistor matris. I denna krets den fungera som en switch, när den får 5v som indata, utdata växeln öppnar. om det finns någon input, stängs switch.
När IR-sensorn ger 5v som utgång, är utgångsstiftet av IR-sensorn kopplat ingångsstift ULN 2003 IC, så motorn börjar att köra, om det finns ingen utgång, motorn stannar.

Enkel och billig DIY interaktiva bakgrundsbelysning.
Enkel, enkel och billig DIY stegräknare med Arduino

Enkel och billig Studio Desk

Stor kran handtag... Enkel och billig...

Hur man bygger en snabb, enkel och billig loudspeakerbox med stuprör material

Enkel och billig swing
En enkel och billig brandman bil siren.

Hemmagjord enkel och billig projektor

En enkel och billig ost Press

GlowChips - en enkel och billig LED lampa enhet

BOE Bot/Arduino raden efter robot

[arduino motor shield] raden efter robot (FC-51)

ActoBitty raden efter Robot

Enkel och billig luft kylare med datorfläktar

Raden efter Robot

LINUS: Raden efter robot
Arduino kontrollerade raden efter Robot
Enkel och billig ROBOT HAND med endast en MOTOR!
