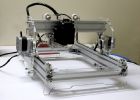
Frankenstein Laser gravör (1 / 18 steg)
Steg 1: Indentifying bärgning looten


TUMREGLER
- Ju äldre skrivaren desto bättre.
- Den nyare skannrar desto bättre.
Scanner stegmotorer är ofta överlägsna skrivare steppers. De har fler steg i allmänhet.
Den nyare skrivaren, den mindre är chansen att få steppers ur den.
Alla skannrar har stegmotorer. Ju äldre desto mer sannolikt du får en unipolär stepper som vi inte kan använda i detta projekt.
--------------------------------
Identifiering delar av gamla enheter är ofta en smärta men jag hade tur med minst scanner stepper. Jag hade hittat en servicemanual för skrivaren. Men detta har inte hjälpt mig mycket.
Skanner / x-axeln
Skannern är en gammal Tevion 2400 dpi scanner. Motsvarar en Microtek Scanmaker 5800.
Nummerlistan är en 96 steg bipolär stegmotor. Det är beskrivning är NEOCENE 2T354207.
Tro inte någon annan som säger att detta är en 100 steg motor. Det är inte! Det har 96 trappsteg. Inte mer inte mindre.
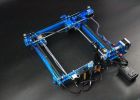
Jag använde sängen av skannern som grund för hela konstruktionen.
Järnväg och tidpunkten belt aswell som släden som bar photoelectronics används.
Men släden för att trimmas för att ge mer utrymme för laser.
Det är något speciellt med stepper. Den har en 4 kugghjul monterade på dess foreplate.
Utväxlingen är luckly försumbar.
Om du är fortfarande nyfiken hur man beräknar en utväxling har en titt på denna sida.
I tyska men matten bevisligen finns det ett universellt språk (eller Använd google translator)
Scanner stepper fungerar som x-axeln.
Skrivare / y-axeln
Skrivaren var en gammal Epson Stylus Photo 925.
Stepper jag bärgade märkligt beskrivs i servicehandboken.
Det säger att det är en 4-fas 48 pole bipolär stegmotor för 42V (?) men eftersom det är en bipolär stepper det får inte vara 4 faser men 2.
Vrida axeln för hand och räknar stegen kom jag upp med 48 steg.
Denna motor (och plattor för skrivaren huvud) fungerar som y-axeln.
Till slut insåg jag att 48 stegen eller motorn själv är den svaga punkten i detta byggt. Det rör sig långsammare än scanner stepper och rasslar på stången. Ingen mässingsdetaljer här. Vaselin bör dämpa den negativa effekten.
Stepper motor specifikationer:
| Tevion 2400 dpi / Microtek 5800 | Epson Stylus Photo 925 | |
| Fas | 2 | 2 |
| Steg ängel | 3,75 ° / step = 96 steg | 7,5 ° / step = 48 steg |
| Spänning | 5 V | 5-12 V |
| Nuvarande | ? | ? |
| Motstånd | 5,5 Ω | 7 Ω |
| Holding torque | ? | ? |
Senare i processen jag reda på att båda motorer dra mindre då minst 300 mA.
Easydriver V4.4 har fortfarande bugg med silke utskrift på den blandning av MAX och MIN av poti.
Så i V4.4 de bytte ut på PCB men ersatte samtidigt poti med en omvänd poti.
Åtminstone det är vad jag har läst på några forum eller kommentarer på Sparkfun.
Smart :)
Så lång historia kort:
Poti är inställd på en lågt motstånd som innebär steppers får en bråkdel av den nuvarande Easydriver kan leverera. Max 750mA per spole. Poti är inställd på ungefär 25%. Bara så att de inte skriker i smärta.
Stepper motor pinut:
På min resa genom det oändliga deepth av Internetsen snubblade jag ofta över fråga som hur att få korrekt ordningen på pinout från steppers.
Du behöver bara ta en bit tråd och Anslut stiften. Om du ansluter korrekt paren ska du känna ett motstånd när du vrider axeln av stepper
DIY 5500mW Laser gravör / Cutter

Hur till: Laser gravör!

Design med Neje laser gravör på Mac OSX

GearBest laser gravör DIY Kit monteringsanvisningar

Arduino Laser gravör trä Design!

Laser gravör/cutter
Mini XY Laser gravör

Laser gravör 2.5W A5
Att göra ett medeltida spel (drag eller pjäser) på Laser gravörens

Laser gravör Auto fokus Probe - rengöring

LEGO NXT Laser gravör

Laser gravör

Pocket laser gravör.
Ännu en DIY Diode Laser gravör

Anpassa din anodiserad ficklampor med en laser-gravör på TechShop

Gjuta en Hacker pass stämpel med Sugru, en Laser gravör och en 3D-skrivare

Med Zen Toolworks CNC med Laser gravör

CNC Laser gravör med GRBL och Arduino
