Gör: it Robotics Starter Kit fånga Sensor Data

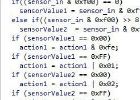
Senaste Instructable vi diskuterade lite om vad linefollow.ino programmet gör. Presenterade jag ett Python-skript som gör det möjligt att analysera den bitvisa om uttalanden att se hur värdet som returnerar metoden read_Optical() konverteras till värden 0, 1, 2 eller 3.
Nu vi allt detta tillsammans och se vad som verkligen händer på roboten. Ibland när man tittar på ett program som någon annan utvecklat är det slags svårt att visualisera vad programmet gör. Så en av de saker jag vill göra är faktiskt titta på vad programmet gör medan det körs. I vår nedan exempel vi ska ta en titt på vilka data Sensorerna skickar till våra lineFollow.ino via metoden read_Optical().
Jo finns det flera sätt att göra detta. Vissa utvecklingsmiljöer har sofistikerade felsökningsprogram och hårdvara felsökningsprogram som tillåter dig att titta på programmet köra på mikroprocessorn. Men om du inte har dessa verktyg finns det ett enklare sätt åstadkomma detta. De flesta mikro-styrenheter, inklusive Arduino, har inbyggd maskinvara som gör att du kan skicka meddelanden till omvärlden med hjälp av en seriell port. Det är i själva verket hur Arduino Uno kommunicerar med Motor driver/sensor styrelsen på roboten.
Det finns en annan mikro-controller som är motor driver/sensor styrelse som ansvarar för att kontrollera motorerna och fånga signalerna från sensorer på roboten. Linefollow.ino programmet körs på Arduino Uno använder den seriella porten för att skicka kommandon till motor driver/sensor styrelsen, att styra motorer och förfrågningar utgångarna från sensorerna. Det finns faktiskt jumper stift som du måste se till är att ansluta den seriella porten till styrelsens motor driver/sensor. Som instruktionerna ange måste du koppla bort dessa tröjor när du vill ladda upp ett program till Arduino. Så i detta fall hur kan vi lyssna på den seriella porten från vår egen persondator när den Arduino och motor driver/givarkort använder seriella porten hela tiden?
Arduino biblioteket kommer med vissa metoder som ger en programvara baserad seriell port. Istället för att använda bygga i hårdvara baserad seriell port, vi kan plocka några tillgängliga två stift på Arduino Uno och använda dessa stift att agera precis som en järnvaror baserat serieport kan också kommunicera utåt. För vår lineFollow.ino program för att skicka meddelanden till våra personliga dator behöver vi en särskild USB-kabel som har en adapter som byggdes. Denna kabel kallas en FTDI USB kabel: (bara google för denna kabel, många online försäljare säljer dessa kablar för runt $15.00 – $20,00)
Min blogg ligger på
http://joepitz.wordpress.com/

Gör: it Robotics Starter Kit
Gör: it Robotics startkit - skicka Sensor Data trådlöst

Interaktiva Ambient Sensor med Intel Edison & Grove Starter Kit Plus
Komma igång med GearBest Starter Kit för Arduino

Murare burk brand start Kit

Starta och stänga datorn

Eld start Kit

Minecraft enkla Starter Kit för överlevnad spelare

Hydrokultur DROPP växande Starter Kit (med chili)
Gör: it Robotics startkit - analysera LineFollowing.ino del 2

Gör: it Robotics startkit-förare ombord förtrogenhet

Sup! Gemenskapens berättande uppleva IoT Kiosk

Intro till Robotics

Hemmet gjorde molekylär modell Kit

Komma igång för Arduino Kit (nybörjare)

Starter projekt 2 | Objekt som sensorer

Starter Project 3 | Sensing utrymmen

Hur du använder Tymkrs vända mig Kit
