Gränsyta för motorer med Arduino (1 / 3 steg)
Steg 1: Anslut alla hårdvara








Ansluta L293D Motor föraren
L293D är en dubbel full-bridge motor driver med en maximal märkström 600 mA per kanal (data täcker). Vilket innebär att du kan samtidigt köra 2 motorer som har en nuvarande efterfrågan inom ramen för IC. I vårt fall, vi använder bara en enda kanal, vilket innebär att vi använder den M1 i / M1 ut hamnar på modulen (stift 2,7 och 3,6 respektive på IC). För att aktivera motorn ansluten till denna kanal, måste vi dra EN1 (pin 1) hög. Jag använder modulen har lämnat en enkel bygel arrangemang till hård tråd detta, se bilden som referens. Alternativt kan du styra detta stift via handkontrollen. pin-anslutningar är som illustreras i figuren.
Ansluta L298N Motor föraren
Liknar L293D, L298N är också en dubbel full-bridge motor driver med en maximal märkström 2A per kanal. Vi kommer att använda bara en kanal dvs. M1, M2 (denna modul har en annan namnkonvention och M1, M2-i finns ingångar och M1-Out, M2 ut är de motsvarande utgångarna) Data Sheet L298N
När vi behöver mer ström som vid en metall inriktad likströmsmotor, drivrutinen är ett ganska bra val. Det låter för bra prestanda, låg värme (även om du rekommenderas använda en kylfläns och de flesta moduler tillgängliga på marknaden har en kylfläns). Det är också en mycket billig, det hjälper.
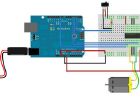
Ansluta servomotor
Servomotorer finns i en mängd olika storlekar och motsvarande moment betyg. Ofta ser vi motorer med ett lägre vridmoment betyg använda plast redskap, men de med vridmoment högre betyg, använda metall redskap.
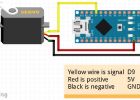
En servomotor har 3 trådar kommer ut från den, dvs Signal, Vcc och marken. Allmänhet är färgkoden som används följande:
Signal > gul/Orange; VCC > röd/vit; GND > svart/brun
Som en tumregel, det enklaste sättet att identifiera dem är den mörkaste en mals, den något ljusare är Vcc, den ljusaste är signalen.
Om du använder en micro servo som HK15178 , kan du driva den med 5V PIN-koden på din Arduino. Dock när det nuvarande kravet är högre, din Arduino inte kan leverera tillräckligt aktuella och därmed du behöver att driva det externt. Vi använder en Universal batteri Eliminator krets (UBEC), som har en bekväm 5V/6V 3A utdata. Anledningen till att vi använder denna krets över en enkel spänningsregulator 7805 är den nuvarande gränsen för spänningsregulatorn är lägre än önskad utdata för att styra ett servo som är cirka 1,5 till 2 a (beroende på sin rating).
PS: Om du makt en högre rating servo hjälp din Arduino, styrelsen kan plötsligt nollställd och beter sig på ett oönskat sätt.
Ansluta Bluetooth-modul HC-05
Detta steg är exakt liknande den som förklaras i Smart telefon kontrollerad LED lampor med HC-05 och Arduino UNO enda skillnaden här är att vi använder Analog Pins A0 och A1 som Digital stift (D14 och D15) för Rx och Tx.

Kontroll av en DC motor med Arduino och Visual Basic

Köra CD-ROM Borstlös Motor med Arduino + 3 Mosfet transistorer
Anslut dc-motor med arduino och kontroll i vänster och höger

Hur man kontrollerar DC-motorer med Arduino

Kör en CDROM Borstlös Motor med Arduino

Styrning av motorer med Arduino

Hur man styr motorer med Arduino och RC mottagare i 10 minuter

Hur använder gamla Stepper Motors med Arduino och A4988 Driver

Gränsyta för c# med Arduino

Dubbla Motor Driver med Arduino använder en SN754410NE Quad halv H-bro

Kontrollera din motors med L293D och Arduino

Att man gör en DIY borstlös Gimbal med Arduino
Sopa servomotor med Arduino Nano

PuttDuino putt-putt hål med arduino

Hur man använder den L298 Motor drivrutinsmodulen - Arduino handledning

Hur du använder L293D Motor Driver - Arduino handledning

Gränsyta borstlös likströmsmotor (BLDC) med Arduino
BLDC Motor Control med Arduino, bärgades HD motor och hallgivare
