Gränsyta för motorer med Arduino (3 / 3 steg)
Steg 3: Ansluta till din smarta telefon
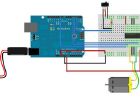
Liknar den tidigare artikeln om Smart telefon kontrollerad LED lampor med HC-05 och Arduino UNO vi kommer att gå vidare och ansluta våra smarta telefonen till arduino via HC-05 Bluetooth-modul.
Vi kommer att skicka kommandot är följande:
Jag vill säga Dc-motor att köra på en PWM värdera av 200 i riktning framåt, skickar jag:
1,1,200
om samma dc-motor skulle vara igång på en PWM 150 i omvänd riktning, skickar jag:
1,-1,150
Formatet är i allmänhet: Motor, riktning, värde
Motor: 1 > Dc-Motor, 2 > Bo Motor, 3 > Motor Servo, 0 > stoppa allt som körs (fred: P)
Riktning: 1 > medsols framåt, -1 > moturs/bakåt
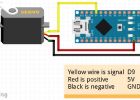
värde: PWM värde från 0 till 255; vid servo är detta vinkeln
PS: Dc-motor och Bo motor, om du tycker att motorn roterar är motsatt riktning än vad som var avsett, interchange bara pin-nummer som tilldelas i programmet för framåt- och bakåtpilarna pins
t.ex.: original
#define DcMotor_F 6
#define DcMotor_B 11
Utbytt
#define DcMotor_F 11
#define DcMotor_B 6

Kontroll av en DC motor med Arduino och Visual Basic

Köra CD-ROM Borstlös Motor med Arduino + 3 Mosfet transistorer
Anslut dc-motor med arduino och kontroll i vänster och höger

Hur man kontrollerar DC-motorer med Arduino

Kör en CDROM Borstlös Motor med Arduino

Styrning av motorer med Arduino

Hur man styr motorer med Arduino och RC mottagare i 10 minuter

Hur använder gamla Stepper Motors med Arduino och A4988 Driver

Gränsyta för c# med Arduino

Dubbla Motor Driver med Arduino använder en SN754410NE Quad halv H-bro

Kontrollera din motors med L293D och Arduino

Att man gör en DIY borstlös Gimbal med Arduino
Sopa servomotor med Arduino Nano

PuttDuino putt-putt hål med arduino

Hur man använder den L298 Motor drivrutinsmodulen - Arduino handledning

Hur du använder L293D Motor Driver - Arduino handledning

Gränsyta borstlös likströmsmotor (BLDC) med Arduino
BLDC Motor Control med Arduino, bärgades HD motor och hallgivare
