Grundläggande tank-drive robot kontroll över Bluetooth med mbed med Freescale K64F (3 / 5 steg)
Steg 3: Testa med BlueTerm
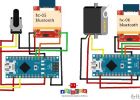
Koppla din K64F till modulen motordrift.
Ansluta till Bluetooth-modulen använder BlueTerm.
Anslut en seriell terminal till USB-seriella porten på K64F från värddatorn till Visa diagnostik.
För testning kan du ändra Deadman timeout från 250 till 500ms standardvärdet till något mer som 15000ms i initMotorDrive() fuinction av main.cpp. Detta gör att du kan testa från en terminal utan att fjärrkontrollen app. När du kör en verklig robot, bör deadman tidsgränsen vara närmare andelen kommando från din befalla app, såsom CXEM-bil, omkring 100 till 500 ms.
Från Bluetooth terminal, ange ett kommando som L255 för full fart framåt på vänstra motorn. Sedan L-99 för nästan halvfart omvänd. Du bör notera att motorn stannar kort med elektrisk broms, då startar upp i omvänd ordning. Du kan göra liknande för rätt motorn med kommandon som R-255 då R111. När utfärdar kommandon R0 eller L0 motorerna ska sluta snabbt med hjälp av den elektriska bromsen.
Den elektriska bromsen i engagerad när båda riktad ingångarna är låga, och aktivera är hög. Annars, när den huvudsakliga körhastighet kontroll sker med PWM på Aktivera raden.
Diagnostik som beskriver alla ovanstående åtgärder kan visas på PC-USB-terminalen. Om du tittar igenom koden finns kommenteras mer diagnostikrapporter ut. De flesta av dessa diagnostik kommer att ha kommandon som ser ut som DiagSerial.printf(...). Du kan ta bort dessa kommentarer för mer diagnostik. Jag har funnit att alltför många diagnostik utskrifter kan orsaka MCU att frysa när som ger en hög ränta kommandot ström, till exempel opne produceras av CXEM-bil app.

Servo kontroll över Bluetooth med Accelerometer

Grundläggande raden efter Robot med Arduino

Linje följande Robot med grundläggande PD (proportionell-derivat) kontroll

Enkla RC bil för nybörjare (Android kontroll över Bluetooth)

S.A.W. rustningen Tips och Tricks: grundläggande gas drivs airsoft pistol koncept
Servo motorisk kontroll via bluetooth med potentiometer
Arduino Bluetooth grundläggande handledning

CxemCAR 1 - Android kontroll RC bil över Bluetooth

Grundläggande remskiva mekanismer

Arduino nybörjare och grundläggande elektronik Kit Primer

Grundläggande elektriska kontinuitet testare

Grundläggande bromstrumman Forge för under $40

ESP8266 Grundläggande IoT ljus

Grundläggande Hand Held Radio hacka för en motorcyklist.

Recept: En grundläggande släktklenod tomatsalsa

Det mest grundläggande i en div-baserade webbplats

Bordsskiva Arcade Machine grundläggande @ Premium modeller

Hur man rita - grundläggande linjära perspektiv
