Grundläggande tank-drive robot kontroll över Bluetooth med mbed med Freescale K64F (1 / 5 steg)
Steg 1: Kontrollera seriell åtgärd


Detta steg förutsätter att du har framgångsrikt används mbed on-line IDE att sammanställa, Hämta och köra kod på brädan Freescale. Om du ännu inte har gjort detta, vänligen följ länkarna i filen mbed.htm på rotmappen på din K64F styrelse och/eller granska Instructable på med FreeScale K64F.
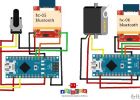
Löda en 4-stifts huvud för bluetooth-modulen till din K64F styrelse och installera Bluetooth-modulen.
Mbed IDE, Välj frdm_serial program som ändras av Aaron Birenboim och importera. Detta är en betydande ändring av de levererade frdm_serial exemplet. Av okänd anledning, kunde jag inte få en enkla serienummer:: getc() uppmaning att arbeta med Bluetooth-modulen. Detta exempel visar på avbryta driven ring buffert metod som antas i full TankDrive robot control programmet.
När din Bluetooth-modul är ansluten till huvudet och MCU styrelsen är driv vid USB från värddatorn, bör du se ett blinkande ljus på den Bluetooth-modul som visar att det ännu inte är ansluten till en värd för Bluetooth. Kontrollera koden i main.cpp att se till att den baud för BT-objektet inställningen är överföringshastigheten på din Bluetooth-modul. De levererar oftast serial-over-Bljuetooth moduler med standard andelen 9600 baud. Denna ränta kan ökas med en AT-kommandot, som diskuteras i den instructable för HC-05 Bluetooth-modulen. Observera att du inte behöver en Arduino att göra detta. Om du har en USB-till-seriell omvandlare, kan det kopplas direkt till HC06 klassmodulen att ange AT-kommandon.
Du kan ansluta till din bluetooth-modul med en Android app som BlueTerm.
Öppna en seriell terminal program på värddatorn att kommunicera med USB-seriella anslutningen på K64F. Under chrome, kan du använda en app som beagle-termeller seriell bildskärmen på Arduino IDE eller en annan följetong-terminal program. Var noga med att ange din överföringshastigheten till 115200, eller förändra mbed koden för att matcha ditt önskade överföringshastigheten.
Du bör kunna skriva text på BlueTerm, och se resultaten på din värd seriell terminal program.
Om du planerar att använda CXEM bil app från Android RC bil kontroll över Bluetooth Instructable, starta upp. Ange MAC-adressen, som ska visas när du ansluter till Bluetooth-modulen från BlueTerm. Ange knappkontroll läge och tryck på en knapp. Du bör se flera Lxxx och Rxxx kommandon visar på din värd terminal om kommunikation fungerar.

Servo kontroll över Bluetooth med Accelerometer

Grundläggande raden efter Robot med Arduino

Linje följande Robot med grundläggande PD (proportionell-derivat) kontroll

Enkla RC bil för nybörjare (Android kontroll över Bluetooth)

S.A.W. rustningen Tips och Tricks: grundläggande gas drivs airsoft pistol koncept
Servo motorisk kontroll via bluetooth med potentiometer
Arduino Bluetooth grundläggande handledning

CxemCAR 1 - Android kontroll RC bil över Bluetooth

Grundläggande remskiva mekanismer

Arduino nybörjare och grundläggande elektronik Kit Primer

Grundläggande elektriska kontinuitet testare

Grundläggande bromstrumman Forge för under $40

ESP8266 Grundläggande IoT ljus

Grundläggande Hand Held Radio hacka för en motorcyklist.

Recept: En grundläggande släktklenod tomatsalsa

Det mest grundläggande i en div-baserade webbplats

Bordsskiva Arcade Machine grundläggande @ Premium modeller

Hur man rita - grundläggande linjära perspektiv
