Hackade roomba + arduino snöbollar i en Eurobot 2013 post... (2 / 9 steg)
Steg 2: Mobil bas: arduino kontrollerade roomba







Nu är det bara omöjligt att hitta en manlig kontakt för detta gränssnitt. Det finns så många minidin ute! http://en.wikipedia.org/wiki/mini-DIN_connector
Så här är hemligheten som kommer att göra detta instructable hela värt: kopplingen är samma som det gamla Macintosh seriella gränssnittet en. Jag har fått ett gäng av dessa kablar på en begagnad dator delar lagra för 1 euro!
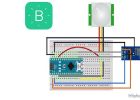
5 stift är av intresse:
-2 power stift för din arduino (jag kopplade in dem rätt i arduino vin pin)
-1 PIN-kod som gör det möjligt för att "vakna" Roomba
-2 stift för seriell kommunikation (Rx, TX)
Jag bara klippa apple kabel och lödda 5 headers så jag kunde Anslut denna kabel till en skärbräda och resten av projektet skulle inte behöva någon mer lödning.
Vi lade till en stor kill switch (som det var obligatorisk för tävling) på den + Vcc kabel så nära som möjligt till batteriet.
Vi hade också att skära kroppen av Roomba ganska lite för att passa de tävling dimensionerna (100cm i omkrets), till den punkt att ett otränat öga inte skulle misstänka vår bas är en Roomba!
Vi har kunnat koppla från Kontrollpanelen på Roomba och de flesta sensorer men inte 4 IR sensorer i stötfångaren. Utan nämnda sensorer är Roomba bara en fancy tegelsten.

Arduino + C# App + OneDrive cloud = IOT

Arduino Countdown tidtagare

SensoDuino: Förvandla din Android till ett trådlösa sensorer nav för Arduino

ArduDroid: En enkel 2-vägs Bluetooth-baserade Android Controller för Arduino

Bildskärmsmenyn ljud ATM-7 Smartphone talaren med Arduino och Blynk

Passiv IR till IR Canon Trigger

DIY Bike Generator

Röst kontrollerade iRobot skapa

Designa och testa en elektromagnetisk bromssystem

Twitter nämna Mood Light

POW-Rduino testning verktyg
DIY larm hus mot tjuvar

Arduino kontrolleras Ping Pong bollar Launcher

Super enkla Arduino Powered Roomba Scheduler

Kontrollera en Roomba robot med Arduino och Android

ARD-e: roboten med en Arduino som en hjärna

Hur man gör en fjärrkontroll kännande web-docka av hacka Twitter, Google, Skype, Arduino och bearbetning!

Arduino metalldetektor
