Hackade roomba + arduino snöbollar i en Eurobot 2013 post... (3 / 9 steg)
Steg 3: Ansluta en nunchuk via RJ45




WiiChuck adaptrar fungerar bra vid första anblicken men de bara så småningom stek din nunchuk. Jag lärde mig den hårda vägen och beslöt att göra något åt det som jag kastade bort det fjärde och sista, döda nunchuk i hushållet...
Nunchuk är i2c enheter och de kräver 3.3V (inte 5v). Detta innebär att du inte kan använda analoga stiften för att driva din nunchuk, du måste använda den 3.3V pin. Jag kom undan med att inte anpassa spänningen 2 meddelande stift.
Jag köpte några "no-varumärke" nunchuks på 5$ en bit i stället för de officiella som på $20 + en bit. 1: 5 var DOA, fortfarande en ok deal dock och de fungerar bra.
Jag kunde inte få den klassiska nunchuk biblioteken för arduino att fungera och jag hittade en mycket rättfram som jag anpassat lite.
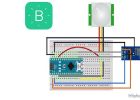
Tävlingen var öppen för tråd-kontrollerade robotar. Barnen i vårt team hade 2 nunchuks i hand kopplad till en skärbräda. Nämnda skärbräda har en kvinnlig RJ45-uttag så den är ansluten till bakbord som lever på roomba genom en vanlig RJ45 Ethernet-kabel.
Så vi har 8 ledningar mellan rutan kontroll och roboten:
-gnd
-vcc (3.3V)
-pin1 vit nunchuk
-PIN2-vit nunchuk
-pin1 svart nunchuk
-PIN2-svart nunchuk
-push knapp A
-knappen B
Vit nunchuk är ansluten till arduino styrelsen som är ansluten till den seriella porten på Roomba.
Svart nunchuk är ansluten till arduino styrelsen som kontrollerar servomotorer. Mer om detta senare.
Koden är ganska självklar tror jag.

Arduino + C# App + OneDrive cloud = IOT

Arduino Countdown tidtagare

SensoDuino: Förvandla din Android till ett trådlösa sensorer nav för Arduino

ArduDroid: En enkel 2-vägs Bluetooth-baserade Android Controller för Arduino

Bildskärmsmenyn ljud ATM-7 Smartphone talaren med Arduino och Blynk

Passiv IR till IR Canon Trigger

DIY Bike Generator

Röst kontrollerade iRobot skapa

Designa och testa en elektromagnetisk bromssystem

Twitter nämna Mood Light

POW-Rduino testning verktyg
DIY larm hus mot tjuvar

Arduino kontrolleras Ping Pong bollar Launcher

Super enkla Arduino Powered Roomba Scheduler

Kontrollera en Roomba robot med Arduino och Android

ARD-e: roboten med en Arduino som en hjärna

Hur man gör en fjärrkontroll kännande web-docka av hacka Twitter, Google, Skype, Arduino och bearbetning!

Arduino metalldetektor
