Hallick min Zoomobil (5 / 16 steg)
Steg 5: Styrning kopplingen



Jag gjorde lite forskning on-line, och så småningom fann följande enkla kopplingen: två långa, tunna, parallella plast struts, den främre fast, och den tillbaka gratis skjuta vänster och höger. Varje hjul sitter i ändarna av dessa stöttor, på en fläns (klippa ur plåt) som skruvas på undersidan av ändarna på en strut-par. När baksidan fjäderben bilder kvar, det sparkar ut baksidan av vänstra hjulet, och drar samtidigt i baksidan av höger hjulet; och visum-versa glidning åt andra hållet.
När jag försökte det, men insåg jag så småningom jag helt enkelt var tvungen att avvika från den ursprungliga utformningen av vagnen. Hjulen är ganska breda, och rörligt dem ens en liten gnutta orsakade hjulen att gnida mot insidan av hjulhusen. Så, så ful som det var, jag bestämde mig för jag var tvungen att flytta hjulen från hjulhusen helt för att få dem att pivotera tillräckligt. Jag gjorde detta genom att använda längre struts. Jag hatade att göra detta stora av en förändring till det ursprungliga utseendet av vagnen, men jag hade inget val.
Efter jag hade skär och samlat allt detta, jag fick reda på Ackerman styrning geometri, pusslas som använder L-formad för att drivhjulen, effektivt sätta varje framhjul på en något annorlunda svängradie medan pivoteras. Det hade varit en överlägsen design, men jag verkligen ville inte återskapa den främre styrning koppling. Dessutom går min vagn inte riktigt någonsin tillräckligt snabbt för att fråga. Om jag skulle göra det över, men skulle jag försöka genomföra Ackerman design.
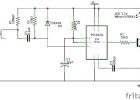
Problemet var nu att ansluta servo till styrning sammanlänkningen.

Hallick min Pong

Hallick min snowracer

Hallick min Saeco kaffemaskin

Hallick min gammal pall (praktiken bit)

USB hallick min Landy

Hallick min Rubiks kub

Hallick min Schwinn cruiser och gör det en verklig cruiser

Hallick min cykel:

Hallick min 350Z armstöd

Hallick min gitarr (fine woodworking)
Hallick min whiteboard

Reparera och uppgradera ett Logitech G25/G27 hjul

Lägga till dekorativa ljus till din bil

Jag är på en (kartong) båt!

Läder manschetten Watch Band + läderarmband 101 - vara moderiktiga oavsett vilken tid du anländer!

Zoltar talar - den Instructable

Pimpa din gamla Mac Pro med en Fusion enhet

Balkong högtalare (PMB pt3)