Hallon PiFace L298N Bi-Directional DC motorisk kontroll

Kit behövs:
1 x DC-Motor
1 x ström för motorn (jag har använt ett 9V batteri) och ansluta leder
1 x Raspberry Pi
1 x PiFace
1 x L298N Motor förare ombord (kan köpas från eBay)
Urval av Jumper Leads/Wire beroende på exakt vad kit du har.
Se Steg
Relaterade Ämnen

Arduino motoriska kontroll Kit
syftet med projektet är att göra en Arduino motoriska kontroll sköld, som är billigt, ergonomisk och lätt att göra. Jag tänkte, varför inte använda kartong i stället för en pcb, efter alla dess lätt att använda för nästan alla!Motorn ansluts till de...

QuickStart dubbelriktad motorisk kontroll
Detta är en full H-Bridge dubbelriktad styrkrets för DC motorer för denParallax QuickStart styrelse.http://www.youtube.com/watch?v=T7lbAXa1-BS&feature=youtu.beDet finns sex transistorer, fyra för motorisk kontroll, de andra två ansluta denmikro-contr...

Servo motorisk kontroll med hjälp av Microcontroller PIC16F877A
PIC16F877A är en lätt micro controller för nybörjareHär i projektet:1) hur PIC växlar servomotor framåt och tillbaka wardNär vi trycker en brytare så går det till positivt 90 graders, på andra switch flyttar bakåt till negativa 90 gradersa. MickroC P...
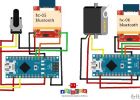
Servo motorisk kontroll via bluetooth med potentiometer
I detta projekt vi servo motorstyrning med potentiometer via bluetooth.Två kommer att göra Arduino styrelsen via bluetooth trådlös haberleştirerek kontroll. Förvaltar en av modulerna för detta (master) medan den andra lyckades (slavar) måste vara i l...
DIY-H-brygga för motorisk kontroll
Någonsin ville göra en robot, men har inte en H-bridge händig? Sedan gör din egen! Det är enkelt, Billigt att göra och enkel i koncept och design. Det har inte Pulse bredd Modulation att kontrollera hastighet, men det är inte helt nödvändiga.Steg 1:...

RR.O.P. - RaspRobot OpenCV projekt
Första: Jag använde en översättare för att hjälpa mig, eftersom jag inte är flytande i engelska, jag ber om ursäkt för dålig engelska. Min avsikt är verkligen att samarbeta.Andra: min tack vare dig fick jag en award i den "MICROCONTROLLER tävling spo...

Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino
Du behöver inte spendera en massa pengar att styra motorer med en Arduino eller kompatibel styrelsen. Efter lite jakt runt vi kan hittade en snygg motorisk kontrollmodul baserad på L298N H-bridge IC som kan du styra hastighet och riktning av två liks...

Arduino Uno och Visuino: kontrollera Smart Car Robot med Joystick och L298N motorn förarens
Smart Car anger i kombination med L298N Motor drivrutinsmoduler, erbjuder en av de enklaste sätten att göra roboten bilar. L298N Motor Driver modul är lätt att kontrollera med Arduino, och med hjälp av Visuino kan du programmera din bil i sekunder.I...

Kompatibla proteshand med sensomotoriska kontroll och sensoriska Feedback för nacke amputerade
Det huvudsakliga målet med detta projekt tillhandahåller en mycket funktionella och billiga proteshand till personer med nedanför armbågen amputationerÄven om massor av state-of-the-art protetiska enheter har utvecklats, fortfarande blir det trycket...

Robot rörlighet avstånd kontroll
detta är det sätt på hur jag har genomfört en rörelse avstånd kontroll på min 3: e robot bil. Poängen är att vi kan ge ett kommando (seriell port eller bluetooth...) till roboten, flytta framåt eller bakåt ett angivet (i kontroll applicacion) avstånd...

Modding en tank för trådlös kontroll
i detta instructable jag visar dig hur du förvandla din RF tank till något kontrolleras via wifi. Den styrspak eller Kontrollpanelen kommer att vara ett PC-program skrivna i C#. Program kan skrivas för android telefoner också, att göra kontrollen ver...

Rachet inverterad pendel kontroll
Detta projekt var baserade bort av Cubli projekt från ETH Zurich. Cubli är en kub som har tre reaktion hjul för att styra balansen i x, y och z hyvlar av kuben. Detta gör kuben för att balansera sig antingen på en kant eller på en hörna. En video av...

Tetraplegi kontroll av en RC bil
Översikt:Quadriplegics kan inte producera rörelse i armar och ben. Utan att ha ett stöd 24/7, skulle de inte kunna komma runt. Målet för detta projekt är att utforma ett system som använder endast förflyttningar från halsen upp till kontroll en simul...

Vifta med handen för att kontroll OWI robotarm... kravlöst
Tanken:Det finns minst 4 andra projekt på Instructables.com (från och med 13 maj 2015) runt ändra eller kontrollera OWI robotarm. Inte överraskande, eftersom det är sådan en bra och billig robot kit att leka med. Detta projekt är liknande i anda (dvs...

Arduino/Android BLUETOOTH - 28BYJ 48 Stepper Motor gardin kontroll APP
Hej världen!Igår gjorde jag en stepper motorisk kontroll app som kan bara vända ett sätt (på och av) och jag sa att jag skulle göra en att kontrollera dina gardiner, så här är det! Kan användas för flera saker naturligtvis. Kolla in nästa steg för ko...

Arduino Etch-A-Sketch Clock
jag har sett olika Arduino drivs Etch-A-Sketch klockor på nätet, men ingen med instruktioner (är det någon slags hemlig? Någon planerar på att göra det rika på den globala marknaden för Etch-A-Sketch klockan?). Jag har använt Arduino, men aldrig anvä...

ESP8266 och Visuino: WiFi fjärrkontroll Smart bil Robot med Wii Nunchuck
Smart Car anger i kombination med L298N Motor drivrutinsmoduler, erbjuder en av de enklaste sätten att göra roboten bilar. Jag har redan gjort en Instructable på hur du kan kontrollera Smart bil med Arduino och Joystick. Det är emellertid mer intress...

En Smart växt låda med blixtar och regnar
Jag är en växt hobby. Några dagar en en av mina vänner ger mig en tallrik av växten, jag vet inte namnet på denna växt, men jag gillar det ändå.Och jag vill byggt en timme för min planta att upptäcka vissa data, sådan temperatur, luftfuktighet och CO...

Komplett Motor guide för Robotics
Roboten är en elektromekanisk anordning som kan reagera på något sätt till sin miljö, och ta självständiga beslut eller åtgärder för att uppnå en viss aktivitet.Roboticists utveckla konstgjorda mekaniska apparater som kan gå själva, vars rörelse måst...