Intellekten Edison och Ridemakerz RC chassi Robotics plattform (9 / 10 steg)
Steg 9: programmering





OK ska jag erkänna, jag inte är mycket av en programmerare. Jag röra runt med Arduino och jag är ganska bra på att blanda och matcha andra folk koden till något som fungerar, men det är allt. THR Arduino fotavtryck av Edison lurade mig att tro att det skulle vara enkelt att få en grundläggande skiss kör. Ställ in i styrelsen var långt utöver vad jag var van vid. Jag var förlorad, men jag hade en livlina - min vän Chris är en programmerare och erbjöd att programmera roboten för mig. Allt jag behövde göra var att bygga maskinvaran.
Detta betyder inte att jag inte försökte. Jag tittade på andras projekt och googlade allt jag förstod, men innan länge, jag hade 10 flikar öppna och min hjärna började imma över. Jag bestämde mig att arbeta på koden genom att använda en Arduino. Jag använde en algoritmisk musik skiss och lagt till mitt eget mönster. Jag ändrade koden för att använda knapparna för att utföra ändringar i mönster spelar. Jag planerade att använda Hall sensor, fotocell och IR-sensorn som avstånd för att kontrollera variabler i mönstret. Jag skulle också använda den digitala kompassen för att växla mellan fyra olika varianter på algoritmen. Jag hittade också rad efterföljare skiss som skulle arbeta med Seeed Studio motor sköld.
Ett samtal med min vän programmerare leda till beslutet att använda Javascript snarare än Arduino skisser. JS skulle göra det lättare att integrera robot kontroll, ljud syntes och "anslutning". Vi beslutade också att använda wifi i stället för bluetooth, så att vi kunde spela utdata.
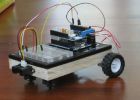
Tja, en sak leder till en annan och vi tenderar att göra saker i sista minuten. Fredagen före tidsfristen rullar runt och vi skulle träffas att slutföra vad vi trodde vara ett enkelt projekt. Jag beslutade att koppla in hoppare ledningar i trådarna från sensorerna och använda en proto sköld med en 17 x 10 skärbräda för att ansluta till Edison. Under tiden, Chris uppdaterad styrelsen och konfigurera den som en webbserver. När fick vi alla att sätta upp insåg jag att jag hade glömt motor batteripaketet. Vi beslutade att träffas lördagen efter jobbet till slut upp.
Det var då problemen började. Vi kunde inte få motorerna att flytta. Jag hade testat dem med batteriet till kala ledningarna och de fungerade bra, de var bara inte få makt genom skölden. Jag var utom mitt djup på denna punkt och Chris justerat PWM stift byglarna och andra tricks till ingen nytta. Vi så småningom medgav och bort Seeed sköld och installerat förare ombord som följde med satsen, även om det inte passade så fint. Vi testade det ut på ett arbete stå med Edison drivs från medföljande vägg vårtan och det fungerade bra. Det faktum att Edison kan programmeras trådlöst var awesome, som Chris sovrum dator hade alla rätt programvara medan köksbänken var en bättre arbetsbänk. Han fick hjulen arbetar, justerat sin makt och sätta upp en rudimentär webb-baserade registeransvarige med min laptop piltangenterna. Genom denna punkt det var sent och vi beslöt att träffas söndag eftermiddag till slut upp.
Genom denna punkt hade vi Edison kommunicerar med motorerna, nästa steg var att programmera linjen efter funktion. Eftersom motorerna arbetade också på 12v batteripack, planerade jag att koppla upp ett 9v batteri att köra Edison, som är sceced från 7-18v. Vi testade roboten i den här konfigurationen. Det skulle börja i som någonsin riktning du skickat det, men det fortsatte bara så tills det rann till något. Vi hade den typiska "hardware guy skyller programvarusystemen / programvara kille skyller hårdvara" konversation som vi petade runt utan resultat. Den slutliga boven verkar vara makt. 9v var bara inte tillräckligt för att driva styrelsen. Grove motor föraren hade en intressant funktion-för att spara resurser används det senaste input tills en ny angavs. Styrelsen skulle starta och ansluta, men så snart vi sänt en signal till motorn, bot skulle börja flytta, Edison skulle dö och starta om och bot skulle gå flyger in i väggen med ingen ny input. Vi försökt omväxlar den runt, med 9v till motorerna och 12v till Edison, men det fungerade inte heller - motorerna arbetade, men styrelsen dog. Den har en massa awesome funktioner i en liten förpackning, men Edison är en bit strömkrävande för småskaliga robotics projekt. Jag måste ompröva utformningen och lösa batteri med högre strömstyrka att köra styrelsen. Med Arduino är det alltid tvärtom!
Så makt var vår akilleshäl. Det och att vara en kaxig nörd som tror han kan dra bort något i sista minuten. Vi hamnade hooking motor föraren tillbaka upp till 12v batteripack, plugga vägg vårtan in en kort förlängning ackord och kör Edison från vägg makt. Det var kul och vi lärde oss en del saker för nästa fas av projektet.

Intellekten Edison och adresserbara lysdioder

Intellekten Edison och Grove ljud sensor - skicka meddelande till mobil via MQTT

Intellekten Edison buller larm (Intel IoT)

Intellekten Edison Sun Station (UV och Temp) med Python #IntelMakerMx

Intellekten Edison enkelt avstånd Sensor med Grove LED Bar indikator och Summer

Intellekten Edison som höghastighetståg I/O server: Digital och Analog I/O överförs via WiFi-anslutning till PC-klienten

Intellekten Edison: Uppdatering, WiFi och WinSCP

Intellekten Edison IoT_Read trycksensor och logga data till SD-kortet

Intellekten Edison Garage ordningsmanen och Alert System

Intellekten Edison, Twitter API och söta hundar

Intellekten Edison Telepresence robot

Intellekten Edison - Robot

Intellekten Edison/Seeed/Nexus 3WD OmniRover
Carduino - A enkla Arduino robotics plattform med ett eget bibliotek

Små Home Automation med Intel Edison och Microsoft Azure

Sensei Cell - bygga ett automatiserat växthus med Intel Edison och Arduino

Intellekten Edison levande temperatur uppvisning

Edison och Arduino/Genuino 101 Trådlös väderstation
