Intellekten Edison och Ridemakerz RC chassi Robotics plattform (10 / 10 steg)
Steg 10: Provning chassit och förverkliga där jag gick fel


Så jag gjorde tre misstag - underskattat jag komplexiteten i Edison. Arduino fotavtryck fick mig att det skulle vara så enkelt att använda. Jag hade den vanliga "hardware guy's" inbilskhet - "Jag byggde det och alla delar är där, nu är allt de behöver göra koden. Två stora stötestenar kunde ha undvikits med bättre forskning på min slut. Jag hittade, allt för sent, en work-around från någon annan som haft samma problem med Seeed motor sköld och närmare granskning av Edisons specifikationer skulle ha avslöjat den ström försörjningsproblem. Mitt tredje misstag var inte att föra i en bättre programmerare tidigare. Jag tänkte jag bara kunde lista ut. Jag behöver gå tillbaka och lära sig mer från Arduino sidan innan jag tar itu med en styrelse som detta ensam.
Som för roboten, nu när vi vet vad som gick fel, vet vi var att gå nästa. Så fort jag hittar en bättre batteri lösning, kan vi arbeta på raden efter funktion. En sak vi märkte är att med 4WD fast hjulet styrning arrangemang, den har en bred vridningsvinkel. Detta kommer att begränsa det linje efter förmåga. En lösning är att ta bort ett kugghjul från varje sida drivlina att göra det en 2WD chassi. Om det inte hjälper, ska jag ta bort bakhjulen och lägga till ett enda hjul hjul i bakre mittläget. Det gör det mycket mer lättmanövrerad.
Istället för att använda Edison resurser för att bearbeta ljud, skickar vi förmodligen sensordata över web-anslutningen till en programvara baserad algoritmisk musikspelare eller annan ljudkälla. Detta möjliggör en större mängd olika ljud, även individualized telefon apps. Eftersom syftet med denna robot är för nå ut till allmänheten och demonstration, mer interaktivitet desto bättre. Människor kommer att uppmuntras att flytta magneterna och andra föremål runt och se hur det påverkar ljudet. Ytterligare sensorer och objekt möjligheter kunde läggas.
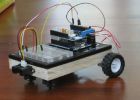
Även om jag misslyckades med att skapa roboten jag föreslog, jag gjorde en bra start och beräknat ute hur till vända en $25-30 RC toy chassi (eller används billigare) till en trevlig robot chassi och plattform. Det är en stjäla jämfört med en "robotics" kit. Vi ska fortsätta att arbeta med roboten under de närmaste veckorna och efter en uppdatering. Håll utkik på Tampa område maker händelser.
Under tiden, är här en video av vår framgångsrika uppbundna drivlina test. Håll ögonen öppna!
Drivlina testa från chuck stephens på Vimeo.

Intellekten Edison och adresserbara lysdioder

Intellekten Edison och Grove ljud sensor - skicka meddelande till mobil via MQTT

Intellekten Edison buller larm (Intel IoT)

Intellekten Edison Sun Station (UV och Temp) med Python #IntelMakerMx

Intellekten Edison enkelt avstånd Sensor med Grove LED Bar indikator och Summer

Intellekten Edison som höghastighetståg I/O server: Digital och Analog I/O överförs via WiFi-anslutning till PC-klienten

Intellekten Edison: Uppdatering, WiFi och WinSCP

Intellekten Edison IoT_Read trycksensor och logga data till SD-kortet

Intellekten Edison Garage ordningsmanen och Alert System

Intellekten Edison, Twitter API och söta hundar

Intellekten Edison Telepresence robot

Intellekten Edison - Robot

Intellekten Edison/Seeed/Nexus 3WD OmniRover
Carduino - A enkla Arduino robotics plattform med ett eget bibliotek

Små Home Automation med Intel Edison och Microsoft Azure

Sensei Cell - bygga ett automatiserat växthus med Intel Edison och Arduino

Intellekten Edison levande temperatur uppvisning

Edison och Arduino/Genuino 101 Trådlös väderstation
