Konstiga förflyttning (5 / 5 steg)
Steg 5: Steg fem: robotarm & rep markör









Denna serie av tester med en robotarm och en specialbyggd
konstiga förflyttning maskin är ett försök att sammanfatta alla upptäcktsfärder i en demonstrator. Att skapa ett system där två maskiner utför en aktivitet som skulle ha varit omöjligt med någon av dem ensam. Alla maskiner är upptagen gör vad den är avsedd för: arm för plockning och utsläppande och konstiga förflyttning maskinen att vara konstig.
En mobil Rope walking dator är aktiverat med en automatisk fästsystem, har markör och en tallrik för arm effektor fastsättning utformats. Som i den föregående iterationen används en Motion Capture system för att spåra den mobila maskinen för att göra det möjligt för dem att samarbeta i realtid.
Robotarm förlägger rep markören på trådar sträckte sig i rymden. När markören lossnar från armen slutar att vara dess effektor och börjar leva sitt eget liv. Som driver det lämnar märken av dess vägar ansättes markör effektor vid behov. När tråden är tillräckligt märkt, armen kommer tillbaka och placerar markören på en ny rep

3D utskrift och CNCing konstiga frihandsfigur linser
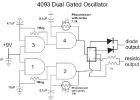
4093 konstiga brus Generator

Konstiga slumpmässiga insekt [SRI]

Med en enda RGB LED (eller en LED strip) för att visa information: klocka, termometer och en konstig kommunikatör

MFOS "Konstiga ljud Generator"

Konstiga ljud Generator - hur man gör en kontrollpanel

Muybridge katt förflyttning halsband

Kyla fack för en bärbar dator gjord av knex (inga konstiga lappar)

Hur man gör en konstig lego man

Billigt, trevligt och konstiga du plotter med A4 rutat ($25 + några skrot)

Roliga/konstiga ansikten på Microsoft paint!

Hur man gör en konstig söker Monster sak

Att göra konstiga spelenheter med Makey Makey

Hur man gör en konstig ljudklipp

Träd och konstiga kinesiska frukter
3 konstiga paradoxer

En enkel konstiga kommunikationsenhet

Konstiga organiska gödselmedel
