Konstiga förflyttning (4 / 5 steg)
Steg 4: Steg fyra: robotarm & ritning driver samarbete.

Detta är verkligen starten av ett slags direkt attack på den rådande
idén i branschen att problem kan lösas genom enstaka maskiner, lämnar användaren för att överbrygga klyftan mellan system.
Målet med denna övning var att förlägga två mycket olika maskiner i samma operation utrymmet och genom att expandera vad var och en av dem skulle ha kunnat uppnå individuellt.
Den viktigaste frågan skiftar sedan från maskinerna själva att gränssnittet mellan dem både programvaran och hårdvaran sidan. Armen bär en programmerbar magnet som gör det möjligt att koppla till och plocka upp den mobila ritning roboten. En Motion Capture system används i rymden för att lokalisera positionen av ritning bot i realtid, vilket gör att maskinerna kan interagera och samarbeta.
Planen för experimentet var att ha en enkel mobil ritning robot och en robotarm plocka upp, att avbryta och misplacing ritningen. Men slutresultatet blev oförutsägbart mer av en dölja och söka spel mellan två.
Mobila roboten har särskilda markörer kopplad till sig för att vara spårbar av motion Capture system. Men när armen närmar sig den ritning roboten, occludes markörer med dess förkroppsligar, förlorar koll på målpositionen och går tillbaka till standardplatsen.

3D utskrift och CNCing konstiga frihandsfigur linser
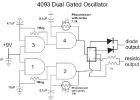
4093 konstiga brus Generator

Konstiga slumpmässiga insekt [SRI]

Med en enda RGB LED (eller en LED strip) för att visa information: klocka, termometer och en konstig kommunikatör

MFOS "Konstiga ljud Generator"

Konstiga ljud Generator - hur man gör en kontrollpanel

Muybridge katt förflyttning halsband

Kyla fack för en bärbar dator gjord av knex (inga konstiga lappar)

Hur man gör en konstig lego man

Billigt, trevligt och konstiga du plotter med A4 rutat ($25 + några skrot)

Roliga/konstiga ansikten på Microsoft paint!

Hur man gör en konstig söker Monster sak

Att göra konstiga spelenheter med Makey Makey

Hur man gör en konstig ljudklipp

Träd och konstiga kinesiska frukter
3 konstiga paradoxer

En enkel konstiga kommunikationsenhet

Konstiga organiska gödselmedel
