Kör en Stepper Motor med en AVR mikroprocessor (6 / 8 steg)
Steg 6: jag aldrig halv-steg, eftersom inte jag är en halv-stepper...
Quest lyriska åt sidan, halv-stepping din motor är där det händer. Du får mer toppströmmen, mer momentana vridmoment och två gånger den kantiga upplösningen.Halv-stepping i ett nötskal: i stället för blå, svart, röd, gul, du kör motorn med blå, blå + svart, svart, svart + röd, röd, röd + gul, gul, gul + blå. Resultatet är att för hälften av tid du engagerande båda magneter på en gång.
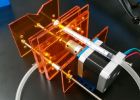
Och under de tider som båda är engagerade, motorn halvvägs mellan de två, krympande vinkeln mellan "steg" och gör den motoriska sväng smidigare. Kan du berätta från videon? Jag är inte säker...
Del av koden som gör halv-stepping ser nu ut så här:
void halfStepping (uint16_t dröjsmål uint8_t direction[]) {uint8_t i; för (i = 0; i < = 3; i ++) {PORTB = riktning [i]; / * enda spole del * / _delay_ms(delay); PORTB | = riktning [jag + 1]; / * Lägg i halv-steg * / _delay_ms(delay); }}
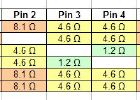
Det första PORTB kommandot anger en enda stolpe till positiva och resten till negativ. Sedan väntar. Sedan anger kommandot andra PORTB en andra pol (på den andra slingrande) till positiva, engagerande båda lindningarna för 1,4 x vridmomentet (och 2 x strömmen).
En full programmet notering är bifogat nedan. Två matriser definieras nu (medsols, moturs) och båda har 5 element varje för i + 1 inträde i funktionen halfStepping.

Bi Polar Stepper Motor med L293D och Arduino

Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino

Kör en Stepper Motor med en Arduino och en A4988 Stepstick/Pololu drivrutin

Kör en unipolär Stepper Motor med ett ppDAQC Pi-platta
Kör en unipolär Stepper Motor med en bipolär drivrutin

Hur använder gamla Stepper Motors med Arduino och A4988 Driver

PIR-SENSOR med ARDUINO aktivera STEPPER MOTOR

Stepper Motor Generator

Arduino/Android BLUETOOTH - 28BYJ 48 Stepper Motor gardin kontroll APP

Bipolära Stepper Motor Driver

Jorden världen roterar med Arduino eller Raspberry Pi kontrollerade Stepper Motor

Trä Gear Clock med Stepper Motor Drive

KONTROLL STEPPER MOTOR hastighet med LABVIEW och ARDUINO
DIY Lizylotte Robot Arm Robotic Rita ram med 2 Stepper Motor
DIY Robot Arm robotiserade 3D skrivare Plotter ritar hemgjord ram med 2 Stepper Motor
DIY Robot Arm Robotic Draw hemgjord ram med 2 Stepper Motor
DIY sprutpumpen med Stepper Motor

Dansar Tippy med arduino och stepper motor
