Kör en Stepper Motor med en AVR mikroprocessor (4 / 8 steg)
Steg 4: Ta motorn för en provkörning

Koppla in kablarna direkt upp till ditt microproc och bränna den med följande kod:
/ * Leker med att få de små stegmotorer driven. */
/ * Inkludera dröjsmål funktion * /
#define F_CPU 1000000UL
#include
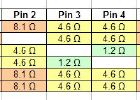
/ * Pin defs för ATTiny2313 * /
/ * Medurs ordning * /
#define blå _BV(PB0)
#define svart _BV(PB1)
#define röd _BV(PB2)
#define gul _BV(PB3)
#define dröjsmål 200 / * millisekunder mellan steg * /
int main(void) {
DDRB = 0XFF; / * Aktiverar utgång på alla B stift * /
PORTB = 0X00; / * Sätta dem alla till 0v * /
While(1) {/ * huvudloop här * /
PORTB = BLÅ;
_delay_ms(delay);
PORTB = SVART;
_delay_ms(delay);
PORTB = RÖD;
_delay_ms(delay);
PORTB = GUL;
_delay_ms(delay);
}
}
Hur enkelt är det koden? Riktigt enkel.
Allt det gör är att göra några fina definitioner så jag kan hänvisa till ledningarna av färg snarare än deras pin-namn, och sedan det växlar mellan dem på i sekvens med en justerbar fördröjning i mellan. Jag valde till att börja med en halv sekunds fördröjning mellan stegen.
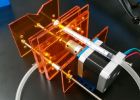
Se den korta videon för resultat. Om du verkligen på ditt spel, räkna antalet steg per cykel att räkna ut motorns singel-stepping vinkelformig upplösning.
(Oh ja. PS. Ladda enheter med nr på 3.6V lätt. Se batteri i video.)

Bi Polar Stepper Motor med L293D och Arduino

Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino

Kör en Stepper Motor med en Arduino och en A4988 Stepstick/Pololu drivrutin

Kör en unipolär Stepper Motor med ett ppDAQC Pi-platta
Kör en unipolär Stepper Motor med en bipolär drivrutin

Hur använder gamla Stepper Motors med Arduino och A4988 Driver

PIR-SENSOR med ARDUINO aktivera STEPPER MOTOR

Stepper Motor Generator

Arduino/Android BLUETOOTH - 28BYJ 48 Stepper Motor gardin kontroll APP

Bipolära Stepper Motor Driver

Jorden världen roterar med Arduino eller Raspberry Pi kontrollerade Stepper Motor

Trä Gear Clock med Stepper Motor Drive

KONTROLL STEPPER MOTOR hastighet med LABVIEW och ARDUINO
DIY Lizylotte Robot Arm Robotic Rita ram med 2 Stepper Motor
DIY Robot Arm robotiserade 3D skrivare Plotter ritar hemgjord ram med 2 Stepper Motor
DIY Robot Arm Robotic Draw hemgjord ram med 2 Stepper Motor
DIY sprutpumpen med Stepper Motor

Dansar Tippy med arduino och stepper motor
