Labyrint Problemlösaren Robot, med artificiell intelligens med Arduino (7 / 10 steg)
Steg 7: Förenkla (optimera) sökvägen

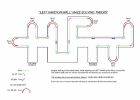
Låt oss återvända till vårt exempel. Ser den första gruppen av korsningar, insåg vi att den första vänster förgrena sig är i själva verket en "återvändsgränd" och så, om roboten i stället för en "vänster Back-vänster" bara gått rakt på den första korsningen, mycket energi och tid skulle sparas! Med andra ord, skulle en sekvens "LBL" i själva verket vara samma som "S". Det är precis hur den fullständiga sökvägen kan optimeras. Om du analise alla möjligheter där en "U-sväng" används, uppsättningen 3 korsningar där denna "kovändning" ("B") visas ("xBx") kan minskas till en enda.
Ovanstående är endast ett exempel, nedan hittar du den kompletta listan av möjligheter (prova det):
- LBR = B
- LBS = R
- RBL = B
- SBL = R
- SBS = B
- LBL = S
Tar den fullständiga sökvägen eller vår exempel, kan vi minska det:
Stig = [LBLLLBSBLLBSLL] == > LBL = S
Stig = [SLLBSBLLBSLL] == > LBS = R
Stig = [SLRBLLBSLL] == > RBL = B
Stig = [SLBLBSLL] == > LBL = S
Stig = [SSBSLL] == > SBS = B
Stig = [SBLL] == > SBL = R
Stig = [RL]
Fantastiskt! Titta på exemplet det är mycket tydligt att om roboten tar höger vid första korsningen och efter det, en vänster, kommer det nå slutet av labyrinten i den kortaste vägen!
Första banan av labyrint Problemlösaren totala koden kommer att konsolideras i funktionen mazeSolve(). Denna funktion är i själva verket funktionen loop() använt tidigare, men med alla dessa åtgärder för optimering av lagring och sökvägen.
När den första banan slutade, måste Stig [] matrisen optimerad sökvägen. En ny variabel införs
unsigned int status = 0; lösa = 0; kommer labyrint slutet = 1
Nedan funktionen första banan:
void mazeSolve(void)
{
medan (! status)
{
readLFSsensors();
Switch (läge)
{
fall NO_LINE:
motorStop();
goAndTurn (vänster, 180);
recIntersection('B');
bryta;
fall CONT_LINE:
runExtraInch();
readLFSsensors();
om (läge! = CONT_LINE) {goAndTurn (vänster, 90); recIntersection('L');}
annat mazeEnd();
bryta;
fall RIGHT_TURN:
runExtraInch();
readLFSsensors();
om (läge == NO_LINE) {goAndTurn (rätt, 90). recIntersection('R');}
annat recIntersection('S');
bryta;
fall LEFT_TURN:
goAndTurn (vänster, 90);
recIntersection('L');
bryta;
fall FOLLOWING_LINE:
followingLine();
bryta;
}
}
}
Här introducerades en ny funktion: recIntersection (riktning)
Denna funktion används för butiken i korsningen och även att ringa en annan funktion simplifyPath(), som kommer att minska gruppen av 3 korsningar som innebär en "kovändning" som vi såg innan.
void recIntersection(char direction)
{
sökväg [pathLength] = riktning; Lagra korsningen i path-variabeln.
pathLength ++;
simplifyPath(); Förenkla den lärda vägen.
}
ÄRAN för den simplifyPath () funktion är att Patrick McCabe för sökvägen Solving kod (för detaljer, vänligen besök https://patrickmccabemakes.com! Strategin att sökvägen förenkling är att varje gång vi möter en sekvens xBx, vi kan förenkla det genom att skära ut återvändsgränd. Till exempel LBL == > S som vi såg i exemplet.
void simplifyPath()
{
om (pathLength < 3 || sökväg [pathLength-2]! = 'B') återvända; bara förenkla vägen om det näst sista tur var en "B"
int totalAngle = 0;
int i;
för (jag = 1; jag < = 3; i ++)
{
Switch(Path[pathLength-i])
{
fallet "R":
totalAngle += 90.
bryta;
fallet "L":
totalAngle += 270;
bryta;
fallet "B":
totalAngle += 180;
bryta;
}
}
totalAngle = totalAngle % 360; Få vinkeln som ett tal mellan 0 och 360 grader.
Switch(totalAngle) / / byta ut alla dessa varv med en.
{
fall 0:
sökväg [pathLength - 3] = s ';
bryta;
fall 90:
sökväg [pathLength - 3] = 'R';
bryta;
fall 180:
sökväg [pathLength - 3] = "B";
bryta;
fall 270:
sökväg [pathLength - 3] = 'L';
bryta;
}
pathLength-= 2. Sökvägen är nu två steg kortare.
}

Labyrint Problemlösaren med Arduino och ArduMoto(Micromouse) V:1.2

Arduino talande Robot baserad artificiell intelligens

Grundläggande raden efter Robot med Arduino
Roboten labyrint Problemlösaren

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Hur man gör en mobiltelefon och dator kontrolleras 3D tryckta Robot med Arduino - IoBot.

Hinder att undvika Robot med arduino

2WD röst kontrollerat Robot med Arduino och BitVoicer Server

Realtid ansikte spårning Robot med Arduino och Matlab

Kontrollera en Roomba robot med Arduino och Android

Avlägsen kontrollerade robot med Arduino och T.V. remote

Gör en Robot med Arduino för nybörjare

SainSmart InstaBots upprätt Rover (själv balansera Robot med Arduino)

Gest kontroll car(robot) med Arduino och Android(bluetooth)

Extremt enkel linje efter Robot med Arduino

Gör en självbalanserande Robot med Arduino UNO

Billig Robot med Arduino

Hur du använder verktyget Problemlösaren i Excel
