Labyrint Problemlösaren med Arduino och ArduMoto(Micromouse) V:1.2

Här '' Instructables'' syftar till att hjälpa någon maker, entusiast att göra sin egen labyrint Problemlösaren (Micromouse). Förekomsten av Micromouses har dateras tillbaka till 1950-talet och tävlingar hålls sedan dess. Även dessa tävlingar kan kräva bra utrustning, men i huvudsak är det en ras av algoritmer. Det finns många algoritmer i denna fråga och det finns alltid förbättringar. Steg för steg, kommer att försöka täcka allt som finns att handla om Micromouses. Från material till design och kodning kommer vi försöka ge många alternativ och idéer som kan hjälpa mig.
PS: Vi inte hävda att vår robot är det bästa och snabbast ut där, detta '' Instructables'' ska vara pedagogiska och roliga! Hoppas du gillar vår handledning och tveka inte att kontakta oss om något du vill dela eller fråga, faktiskt vi uppmuntrar dig att dela vad du har gjort! Så skicka oss om du har försökt att bygga din egen :)
EDIT: Efter att ha försökt att förbereda för några lokala tävlingar, jag har märkt vissa brister av egen design och grundläggande missuppfattningar. I denna (V1.1) edit, skulle "jag vilja lysa ljus över dessa buggar."
REDIGERINGAR AV V1.1 ÄR PÅ:
- Material & verktyg
REDIGERINGAR AV V1.2:
På mer forskning och provning, vi beslutade att ändra din motors från DC-motorer till stegmotorer skulle vara mer exakt, trots för att offra hastighet och tid. Jag kommer att publicera en material lista efter att vi avslutar helt vår robot! -Mert

Labyrint Problemlösaren Robot, med artificiell intelligens med Arduino

Rörelseaktiverade ljus med Arduino och HC-SR04 sensor

Kontrollera en LED med arduino och Wifly sköld

Multiplexering med Arduino och 74HC595

Mugg musik: Förvandla vatten till ett Instrument med Arduino och ChucK

Säkerhetssystem och tillgång kontroll med Arduino och RFID-

Hur använder gamla Stepper Motors med Arduino och A4988 Driver

Power övervakning med Arduino och logga in i Google blad

Roligt spel med arduino och bearbetning

Kontroll av en DC motor med Arduino och Visual Basic

Styra din Tv, Dvd och ljud system med Arduino och Android

Kapacitans mätare med arduino och 555 timer

Hur man styr motorer med Arduino och RC mottagare i 10 minuter

Styra DC Motors(PC Fans) med Arduino och Relay board

Kontrollerar ledde med Arduino och C#

Kontrollera en RGB ledde med Arduino och bearbetning

Spela upp ljud på dator med arduino och progduino
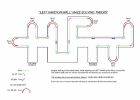
Roboten labyrint Problemlösaren
