Labyrint Problemlösaren med Arduino och ArduMoto(Micromouse) V:1.2 (3 / 8 steg)
Steg 3: Lär känna din styrelser och använda dem!



Vi kommer att använda en Arduino UNO och en ArduMoto sköld för Arduino. I grund och botten använder vi en mikrokontroller (Arduino) och en ad-on (ArduMoto) för det ha en lättare tillgång till våra motorer. Vi kommer att ha en mer detaljerad avsnitt om hur de fungerar tillsammans i avsnittet "Kod" men här är några länkar som du kan dra nytta av:
- https://www.Arduino.cc/en/main/Software
- https://learn.Sparkfun.com/tutorials/ardumoto-SHIE...
- https://github.com/jeroendoggen/Arduino-ardumotor-...
http://www.incertitudes.fr/robot/ArdumotoQuickStar... (Riktigt bra förklaringar med bilder)
https://www.Pololu.com/Product/1217 (Pololu hjulet encoder referens **)
Självklart om du vill använda dessa styrelser behöver du Arduino SDK(1st link) och ArduMoto * library(2nd link)
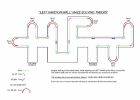
För detta steg, kommer att du behöva löda din Arduino och ArduMoto, om är unsoldered. Efter att hålla din lödkolv varm eftersom du kommer att behöva löda 2 kondensatorer i styrelsen sedan löda till utsedda stiften på bilden. Sedan interlock styrelser. Detta sätt vi ansluter stiften i styrelserna fysiskt och redo för att ansluta yttre delar.
* Om du inte vet hur du importerar bibliotek till din Arduino: https://www.arduino.cc/en/Guide/Libraries
** Se till att du läst den bra och hur kan du konfigurera qtr sensorerna på kodaren. Det står att du enkelt kan konfigurera dem med hjälp av en mikro-controller, som jag hittade svårt att.

Labyrint Problemlösaren Robot, med artificiell intelligens med Arduino

Rörelseaktiverade ljus med Arduino och HC-SR04 sensor

Kontrollera en LED med arduino och Wifly sköld

Multiplexering med Arduino och 74HC595

Mugg musik: Förvandla vatten till ett Instrument med Arduino och ChucK

Säkerhetssystem och tillgång kontroll med Arduino och RFID-

Hur använder gamla Stepper Motors med Arduino och A4988 Driver

Power övervakning med Arduino och logga in i Google blad

Roligt spel med arduino och bearbetning

Kontroll av en DC motor med Arduino och Visual Basic

Styra din Tv, Dvd och ljud system med Arduino och Android

Kapacitans mätare med arduino och 555 timer

Hur man styr motorer med Arduino och RC mottagare i 10 minuter

Styra DC Motors(PC Fans) med Arduino och Relay board

Kontrollerar ledde med Arduino och C#

Kontrollera en RGB ledde med Arduino och bearbetning

Spela upp ljud på dator med arduino och progduino
Roboten labyrint Problemlösaren
