Labyrint Problemlösaren Robot, med artificiell intelligens med Arduino (5 / 10 steg)
Steg 5: Genomför "Vänster Hand på väggen" algoritmen på Arduino kod

När vi har funktionen readLFSsensors() ändras för att den extra 2 sensorer, kan vi skriva Loop funktion för att köra algoritmen som beskrivs på det sista steget:
void loop()
{
readLFSsensors();
Switch (läge)
{
fall NO_LINE:
motorStop();
goAndTurn (vänster, 180);
bryta;
fall CONT_LINE:
runExtraInch();
readLFSsensors();
om (läge == CONT_LINE) mazeEnd();
annat goAndTurn (vänster, 90), / / eller är det ett "T" eller "Cross"). I båda fallen går till vänster
bryta;
fall RIGHT_TURN:
runExtraInch();
readLFSsensors();
om (läge == NO_LINE) goAndTurn (höger, 90),
bryta;
fall LEFT_TURN:
goAndTurn (vänster, 90);
bryta;
fall FOLLOWING_LINE:
followingLine();
bryta;
}
}
Vissa nya funktioner visas här.
followingLine() är densamma som används med följande rad Robot, där om det endast efter en linje, det måste calculatePID(); och kontrollera motors beroende av PID värden: motorPIDcontrol();
runExtraInch(): Kommer att driva roboten bara lite. Hur mycket roboten kommer att köra beror av tiden som du använder i funktionen fördröjning innan du kommandot motorn att stoppa.
void runExtraInch(void)
{
motorPIDcontrol();
Delay(extraInch);
motorStop();
}
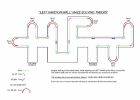
goAndTurn (riktningen, vinkel): Denna speciella funktion är viktigt, eftersom du inte kan flytta roboten så snart du inser vilken typ av korsning du är. Kom ihåg att vi projekterat en differentiell Robot att när att göra svängar, det "vänder runt dess yxa" och så, för att flyttningen 90o och kontinuerligt följa raden, centrera av hjulen skall vara i linje med mitten av korsningen. När raden av censuren är före dess yxa, måste du köra roboten framåt om du vill justera dem. Konstanten av tid adjGoAndTurn måste justeras beroende på avståndet mellan axe och sensor linje ("d"), hastighet och storlek på hjulen (se bilden för illustration).
void goAndTurn (int riktningen, int grader)
{
motorPIDcontrol();
Delay(adjGoAndTurn);
motorTurn (riktningen, grader);
}
På denna punkt är roboten i själva verket "lösa en labyrint"! Du har bara den "första Pass". Gör inte fråga där du börjar inne i en labyrint, du kommer nå slutet.
Bröl, ett test av denna fas av projektet:

Labyrint Problemlösaren med Arduino och ArduMoto(Micromouse) V:1.2

Arduino talande Robot baserad artificiell intelligens

Grundläggande raden efter Robot med Arduino
Roboten labyrint Problemlösaren

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Hur man gör en mobiltelefon och dator kontrolleras 3D tryckta Robot med Arduino - IoBot.

Hinder att undvika Robot med arduino

2WD röst kontrollerat Robot med Arduino och BitVoicer Server

Realtid ansikte spårning Robot med Arduino och Matlab

Kontrollera en Roomba robot med Arduino och Android

Avlägsen kontrollerade robot med Arduino och T.V. remote

Gör en Robot med Arduino för nybörjare

SainSmart InstaBots upprätt Rover (själv balansera Robot med Arduino)

Gest kontroll car(robot) med Arduino och Android(bluetooth)

Extremt enkel linje efter Robot med Arduino

Gör en självbalanserande Robot med Arduino UNO

Billig Robot med Arduino

Hur du använder verktyget Problemlösaren i Excel
