Ljus upptäcka och positionering enhet (1 / 4 steg)
Steg 1: System disposition

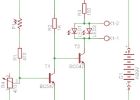
Den hårdvara delen av projektet består av sensor array och muxes kontrollapparaterna. Varje sensor i matrisen sensor ska generera en analog spänning mellan 0 och 5 volt som är direkt proportionell mot intensiteten av ljus som skiner på sensorn. Sensorerna är anslutna till muxes olika ingångar och multiplexed använder en Välj signal från FPGA ombord innan vi går in kontrollapparaterna. Detta minskar antalet ingångar från 24 till 3. Kontrollapparaterna används sedan att jämföra spänningar till en referens spänning produceras av FPGA styrelsen för att skapa en digital signal som FPGA styrelsen kan använda.
Detta projekt kräver också en FPGA för att fungera. I vår bygga använde vi en Nexus Basys 3 styrelse. Styrelsen måste ta i sensordata från externa kontrollapparaterna. Styrelsen har att skanna i sensordata genom mata en varierande Välj signal till den externa muxes, som gör det möjligt att skanna in alla sensor värden. Referensspänningen måste styras av styrelsen också. Styrelsen måste sedan hitta vilken sensor tar emot mest ljus och lagra positionen för sensorn. Slutligen har styrelsen att konvertera denna ståndpunkt värde till instruktioner för externa servo. Bilden ovan visar vår ursprungliga idé för systemarkitektur för FPGA styrelsen.
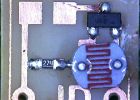
Micro Light upptäcka krets

Solar Dark upptäcka LED-lampa

CD-RW-skivor att upptäcka nya saker!

Camping/utanför larmsystem för att upptäcka odjuret och människor
Automatisk night-upptäcka skåp ljus

Göra Linux-System att upptäcka av fjärranslutna Bluetooth-enheter

Förvandla Raspberry Pi till en Bluetooth-enhet som kan upptäckas av fjärranslutna bluetooth klient

Med en ACS712 och Arduino för att upptäcka manöverdonet gränser

Artemis & Apollo: Dans med Arduino och ljus upptäckt

Upptäcka cirklar med OpenCV och Python

Att skapa Bookhuddle.com, en webbplats för att upptäcka, organisera och dela bokinformation

Älskar lampa - Motion och mörker upptäcka

Onda Dark upptäcka sol Piggy Night Light

Pensel penna: Upptäcka färg till kontroll dator markören

Hemlig knackning upptäcka låda Lock(origional)

Arduino ljus efter Robot och undvika

Upptäcka falska polymer vietnamesiska pengar
Dark upptäcka nattlampan
