MeArm Robot Arm - din Robot - V1.0 (3 / 13 steg)
Steg 3: Låt oss gå!








Med din servon kalibrerad kan vi få sprickbildning. Bokstavligen om du har en av våra snapin ut förpackningar!
Du kommer antagligen behöva spendera lite tid att ta bort det skyddande bakningen på akryl bitar. Du kan antingen göra det när du går eller allt på en gång. Ditt samtal.
Leta upp den största delen (#1) och fäst de klibbiga pad fötterna till dess hörn. Sedan infoga de fyra 20mm skruvarna från undersidan och skruva fyra nötter halvvägs ner dem.
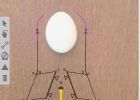
Nu hitta del #2, #3, din centrum servo, och två 8 skruvar mm. Tråd servo genom del #3, som vi kallar en krage. Tryck skruvarna genom kragen och sedan skruva dem i del #2.
Skruvarna själv utnyttja del #2, detta innebär de skära egna tråd. På MeArm finns det två hål storlekar en vid ca 3mm där du kan driva skruven igenom och andra på runt 2,6 mm där vi vill skruven till self kranen. Detta är en metod som vi lånat från den fantastiska PlotClock av Joo.
Nu vi koppla servo / krage församlingen att del #1 via 20mm skruvarna, kommer dessa själv peka på och orientering av hålen på delar bör innebära att du inte kan få det på fel sätt. Detta kallas Poka-yoke och är en metod för dåre proofing mönster. Om du har en tidig modell v1.0 ser du mitt försök till detta är över nitisk är eftersom det endast 1/8 sätt att få det rätt (om du inte kan matcha upp hål flip delen över). Senare version var mildras av rådgivningen av Scott Pierce och har 1/2 sätt.

Fjärrstyrda robotarm (MeArm) med pfodApp

Kontrollera MeArm via mobila applikationen - Arduino och OneSheeld

Hur: Göra en motorsåg Arm

Industriella IoT program - bygga din egen Laser resa tråd

Att göra en MeArm Joystick Pad

Intro till modell flygplan Autopilot!

Bygga Quadcopters, drönare och Uav: s-en förklaring och lätt bygga av en grundläggande Quad.

Bazubands- eller pansar för underarmarna

DIY Quadcopter Drone

Robust Quadcopter bygga

Laser skär MultiWii baserade quadcopter

Gå tillbaka till skolan i stil, göra hand-me-downs nya!

Damm-rengöring kvarstad för Vinyl skivspelare

Giant Robot Arm "meArm" Remix

Pocket Sized Robot Arm MeArm V0.4

Gör din egen 3D tryckt Robot ARM

Modulära Robotic Hand & Arm (med Extended Range of Motion) (3D tryckt)
Simulering av robot Arm Gripper
