MeArm Robot Arm - din Robot - V1.0 (2 / 13 steg)
Steg 2: Hålla upp! Låt oss kalibrera!






Om du har laser skära dina delar eller köpt en av våra kit ska du verkligen få det byggs. Men först måste du slutföra ett viktigt steg. Vi måste kalibrera servon. Använder här vi våra hjärnor styrelse, som är en Arduino kompatibla, men du kan använda något som kommer att generera en PWM-signal att kalibrera dem. Det finns MeArm koden för Arduino, Raspberry Pi, Beaglebone Black, Sparkcore och Espruino.
Det kommer använder våra hjärnor styrelsen programmerad att gå till positionerna som standard. Som är 90, 90, 90 och 25 för servon för centrumet, vänster, höger, och klo respektive. Markera en mittlinjen på spindeln och kroppen av servo och du kan också markera dem c, l, r och c eller av ett annat system som kommer att betyda något för dig.
Bli inte frestad att slå dem för hand, vridmomentet som tillhandahålls av din mäktiga styrka kunde tömma de servo redskap. Av samma anledning är det verkligen viktigt att du gör denna process innan du bygger din MeArm.
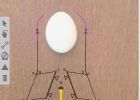
Om du använder och Arduino sedan inställningen visas i bilden ovan och här koden ger dig samma resultat. Vi använder Codebender för vår demo kod och skulle älska en tshirt. Så vänligen använd denna länk om du kommer att öppna ett konto.
Den viktigaste delen att inse att upprätta din servon är att inte du kan driva dem via din mikrokontroller. Du behöver en separat 5-6V 2A strömförsörjning, med en gemensam grund till micro controller. Kolla in Arduino ställa in bilden för mer info.

Fjärrstyrda robotarm (MeArm) med pfodApp

Kontrollera MeArm via mobila applikationen - Arduino och OneSheeld

Hur: Göra en motorsåg Arm

Industriella IoT program - bygga din egen Laser resa tråd

Att göra en MeArm Joystick Pad

Intro till modell flygplan Autopilot!

Bygga Quadcopters, drönare och Uav: s-en förklaring och lätt bygga av en grundläggande Quad.

Bazubands- eller pansar för underarmarna

DIY Quadcopter Drone

Robust Quadcopter bygga

Laser skär MultiWii baserade quadcopter

Gå tillbaka till skolan i stil, göra hand-me-downs nya!

Damm-rengöring kvarstad för Vinyl skivspelare

Giant Robot Arm "meArm" Remix

Pocket Sized Robot Arm MeArm V0.4

Gör din egen 3D tryckt Robot ARM

Modulära Robotic Hand & Arm (med Extended Range of Motion) (3D tryckt)
Simulering av robot Arm Gripper
