Motor controller (2 / 4 steg)
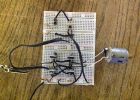
Steg 2: Design kretsen

I denna design är byta frekvensen ca 87 kHz, som var trimmad till motorerna på rover. Intermittensen är spänning talfält tröskeln till monostable oscillatorer drivs av en astable oscillator. En digital till analog omvandlare på rover's dator kontrollerar tröskelvärdet spänningen och därmed intermittensen av förstärkarna.
Formulären PWM våg genereras av sju timers (alla fyra 556 har två timers och åttonde timern är oanvänd). Den första timern ställs in för astable svängning och växlar mellan en på och en off stat vid 87 kHz. Denna 87 kHz klocksignal matas in i triggers för de andra sex timers, som är inställda på att fungera i monostable läge. När en monostable timer tar emot en trigger signal, ändrar det statligt från utanför (0 volt) till på (5 volt) för en tid av inspänningen. Den maximala tiden är ca 75% av klocksignalen astable minimitiden är noll. Genom att variera inspänningar, kommer att varje monostable timer generera en 87 kHz fyrkantsvåg med mellan 0 och 75%. LMD18200 marker fungerar helt enkelt som digitala växlar styrs av produktionen av timers och av broms och riktning digitala ingångar från datorn.

Hemgjord 100 HP Motor Controller för en elbil

200kW AC Motor Controller för elektriska bil

12-24v DC motor controller med en EG1 SPLat PLC

24V Motor Controller för $24, RC & Arduino

BaW-Bot del 2: Bygga motor-controller & kropp

DC Motor Controller

Kontrollera Actobotics dubbla Motor Controller

DC Motor Controller för elektrisk cykel
Lätt DC Motor Controller

Industriella Motor Controller tränare

Hjälp av WASP Motor Controller (ESC)

Arduino Lego EV3 motor controller spara $45

USB: - DC Motor Controller med PIC18F4550 (keyboard)

Titanium elektriska grodyngel Recumbent Full Suspension Trike med DIY Motor Controller

QuickStart - en transistor DC motor controller

Göra en 8-amp Dual Motor Controller för $40
Online DC motor controller

Arduino moduler - L298N dubbla H-Bridge Motor Controller

PIC RC Motor Controller (och exempel lego roboten)
