ROAMING ROBOT (5 / 7 steg)
Steg 5: Roboten



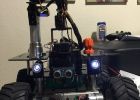
Servo fungerar som robotar hals, det kan vända ultraljud sensorn i olika riktningar. Ultrasonic sensorn används för att upptäcka hinder, som roboten kommer att sedan undvika, för hinder för låg för ultraljud sensorn upptäcka växlarna utlösaren kommer att pressas och objektet kan då undvikas. Foto-motståndet används för att upptäcka ljusnivå och om det anses för mörkt lysdioden tänds. IR-sensorn används för att upptäcka droppar, så att roboten inte faller ner en fallhöjd, som ett steg.
De två likströmsmotorer trollkarl chassit är anslutna till Motor sköld, vänstra motorn till de två mest vänster skruvplintar på skölden och rätt motor till de två mest rätt skruvplintar på skölden. De 2 mellersta skruvplintar på skölden används för att driva motorer. 9V batteri ska anslutas till dem. (Bara Observera att om en eller båda av robotar motors flytta i motsatt riktning än väntat, kan detta åtgärdas genom att byta motor 2 sladdar runt mellan skruvplintar ansluts de till på motor skölden.)

Robolocity Roaming Instructables Robot Gnome - RoboGnome

Arduino Robot handledning

Belvedere - en Butler Robot

K-9 2.0. WiFi kontrollerade och autonom Robot hund.

Robot vacuum golvraka
Rover reparation Robot

Sir Kitt, Robotic programledare

(med Video) Grundläggande Arduino Robot, ljus sökare!

PulleyBot: En remskiva Driven Robot

Instructables Robot klockan

2D tecknad Animation av Instructable Robot

DIY Robot Cart (billigt + kraftfulla + snabb)

Enkel robot-låg förlorat-mycket användbart

2 rullar Android vikt kontrollerad robot

A Följ mig robot med enkel krets

Virkade fyrkantig hatt - Instructable Robot, Sponge Bob & WALL-E

Cross-Stitched Instructables Robot

Lucy's Retro Robot kostym... Gjorde med husgeråd!
