Robo-HEJARE - 3lb bekämpa Robot (1 / 3 steg)
Steg 1: Design och koncept



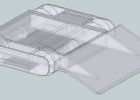
, men med disken på 6" dia roboten skulle vara komiskt stora att ha någon stabilitet. Jag tänkte på det lite mer och beslöt att göra en horisontell spinner. Efter att titta på mångaandrahorisontellaspinnare fast jag med allmän utformning som många vågräta spinnare delar. Som är en semi triangulär form med vapen framtill och hjul på baksidan.
Nu när jag hade vapen och dimensionering av robot kunde jag börja arbetet på att utforma allt annat. Jag bestäms först vilka komponenter jag ville använda. Jag gick med två Fingertech TinyESC och 1000 rpm motorer med 2 1/4" hjul för enheten eftersom kombinationen är snabb nog för en weaponed robot. Jag bestämde mig att köra roboten på 3s eller 11,1 v eftersom jag redan hade 3s lipo batterier och en laddare kvar från ett annat projekt.
För att faktiskt designa roboten använde jag Autodesk Inventor. Jag först bygger ut området behövs av varje robot komponent och därefter räknat ut hur liten jag kunde göra roboten och fortfarande passar allt. En annan utmaning var att hålla det under vikt. Utforma den i ett CAD program gjort allting lättare än andra design metod använder jag som är fysiskt lägga ut varje komponent och sen dra en disposition på kartong.

Bekämpa Robot för Under $250
Naken Singularity: Beetleweight kil bekämpa Robot

Titan: 30kg bekämpa Robot under $100

Autonoma Sumo bekämpa Robot med pneumatiska Flipper - hur man

Hur att utforma och bygga en bekämpa robot

Bekämpa Robotics handledning

Bekämpa robotar

Blitzkrieg: Bluetooth kontrollerad 110lb bekämpa roboten.

Unskinny Bot: 3-lb horisontella Spinner bekämpa Bot

Bekämpa förlorade strumpor med förlorade strumpa bag

Tillbaka raka Coaching enhet för att bekämpa hållning. Förhindra att bekämpa faller nu!

Bekämpa Smörkniv

Bekämpa monster i Minecraft

Bekämpa Ghillie Hoodie - för Airsoft, jakt eller Apocalypse...

Bekämpa förkylningar och influensor med eld Cider

LEGO bekämpa kniv

K'nex BJ-2 bekämpa kniv mods

Knex T.C.R. 51 (taktiska bekämpa gevär.51 cal) Mk1
