Smeka blick: 3D tryckt strukturer med SMA manöverdon (6 / 6 steg)
Steg 6: Använda materialegenskaper för utformningen av en SMA manöverdonet








Som diskuterats ovan, kan den materiella rekvisitan ge tillräcklig kraft att ta tillbaka SMA manöverdon på deras sträckt (inledningsskedet). Här är en video som visar en av prototyperna som Paolo och jag har utvecklat visar relativt lika kylning / uppvärmning gånger svar SMA manöverdon. Som ni kan se, som SMA debiteras med El det kontrakt och böjer PLA medlemmarna, och när det finns inga aktuella går det långsamt tillbaka till sin fulla längd på grund av den mekaniska styrkan av PLA. Manöverdonet i denna video består av SMA fjädertråd, PLA medlem (tryckt med MakerBot) och tydliga akryl för basen.
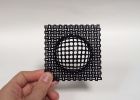
För att utveckla denna design vidare, som du kan se i denna bild, har detta tillvägagångssätt implementerats för aktivering av cellulära strukturer genom att samla SMA manöverdon mellan noder av stiff/hårt material. Därför:
1) kraft aldrig överförs till den mjuka medlemmen direkt men är alltid en övergång i force distribution från hårda till mjuka.
2) den materiella rekvisitan av PLA plus cellstruktur ger ett intressant ekologisk svar genom uppvärmning/kylning cykler av SMA. Detta synsätt på utformningen av förslaget kan ge en ekologisk, tyst, liv-liknande rörelse till din design.
Okej. Låt oss försöka och göra en liten prototyp tillsammans. Du kan tillämpa denna logik på nästan vad som helst du vill designa. Bifogat hittar du 5 olika STL-filer som måste monteras och tilldelat med olika digitala material. Anta du har en gradient av material, från mjuka till hårddisk. Arbeta med Objet 3DPrinter, jag väljer från fortfarande till hårddisk (TangoBlack + > Shore 60 > Shore 85 > grå 40 > grå 25 > VeroWhite). Logik är att, oavsett var du applicera en kraft (SMA manöverdon) då materialet måste vara stel (VeroWhite i detta fall) och mellan noder material gradvis få mjukare. Detta sätt, skulle du ha en mjukare övergång för force distribution inte olika strukturer i natur. Efter utskrift denna pjäs, måste du bifoga SMA manöverdonet. För det, jag använde en MakeBot att skriva ut anslutning medlemmar av PLA som samlades senare i pjäsen, och sedan jag monterat SMA (se bilderna). Bifogade kan du hitta filen STL för PLA filer också. Hur kan de PLA delarna kopplas till vårt cellulära nät? Med hjälp av skruvar och muttrar från McMaster http://www.mcmaster.com/mv1444941043/#catalog/121/... kan du bifoga dina medlemmar tillsammans och du behöver inte oroa sina anslutningar alls. Observera även att du inte kan löda något att SMA manöverdon. Därför både för anslutningar till den elektriska kabeln samt för lederna, skulle du behöva använda crimp rör (du kan hitta en mängd av dessa produkter här: http://www.beadalon.com/). Jag har också använt tiny öga terminaler för anslutningarna mellan SMA och skruvar.
Som ni kan se i dessa bilder, var nästa steg att utforma form av dessa moduler. Jag blev väldigt inspirerad av storskaliga system för djur och fisk. Därför undersöker designprocessen hur en cellstruktur kan byggas in i 3D-mått till skapa ett formellt uttryck. Alla formulär genereras computationally använder Grasshopper i Rhino-vilket i sig kan vara en ny instructable-. Detta var en starkt iterativ, fram och tillbaka process mellan digital design och fysiska tester med hjälp av 3D-skrivare.
3D-utskrifter och beteende Study / smeka av blick från Lennart Farahi på Vimeo.
Här är videon av den slutliga 3D utskrift processen:
3D-utskrifter Process / smeka av blick från Lennart Farahi på Vimeo.
Jag hoppas att detta projekt kan ge en ny syn på motion design för våra dagliga objekt som är mindre utifrån konventionella mekaniska system genom att införa en mjuk och ekologiska rörelser i fråga. Och förhoppningsvis jag har lämnat ett litet steg mot en design av en programmerbar fråga... Lycka till och glad att göra!
Speciellt tack till:
Paolo Salvagione
Sebastian Morales Prado
Julian Ceipek
Charlie Nordstrom
Gabriel Patin
Vanessa Sigurdson
Noah Weinstein

Hand proteser med NiTinol manöverdon (TfCD projektet)

Minibuilders - hur man 3d utskrift stora strukturer med små robotar

Jämföra 3d tryckt Voronoi strukturer med shell strukturer (TfCD)

Pneumatiska Manöverdon - 3D tryckta, Air-powered langare

Dolda kök apparaten med linjära manöverdon från Firgelli Auto

Rocker Switch och Joystick ledningar med linjära manöverdon

Kinesiska rickshaw med Knex Man

Med relä styrelser att styra linjära manöverdon

3D tryckt medaljong med mig i den

Krånglig ballong pneumatiska manöverdon
Linjära manöverdon för Pop ner TV mekanismer från ditt tak

Cell phone kontrollerade linjära manöverdon

Styra tidpunkten för ett manöverdon förslag

Robotbuilderseller liv storlek robot jag bygga från lederna och gängade stav och homemde linjära manöverdon. Jag använder nu automotive kulleder för höfterna ect. Förhoppningsvis kommer ett controll system en hud.

Hur man gör en mobiltelefon och dator kontrolleras 3D tryckta Robot med Arduino - IoBot.

Hur man skär en tryckt logotyp med en siluett porträtt
Thermoextensible 3D tryckt strukturer: funktioner och program

Lätta upp 3D tryckt raketen med bas
