Tinkertrons: Göra artificiella neuroner för robotar (2 / 9 steg)
Steg 2: Hur de fungerar

Ett annat sätt att undersöka det, är att försöka efterlikna så många kända egenskaper av nervceller och använda befintliga mikro-kontrollanter att försöka upptäcka neurala nätverk som fungerar i den verkliga världen. Det är vad jag försöker.
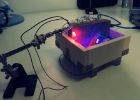
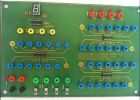
Tinkertrons är utformade för att enkelt kunna kopplas in och konfigureras om i någon kombination att skapa sofistikerade kretsar som ungefär emulera djurs nervceller. När de är hopfogade, överföra de makt och två rader av seriell kommunikation genom huvudet uttagen på fyra sidor och topp och botten. De har var och en också infraröd sändare som tillåter dem att kommunicera med omvärlden eller någon neuron i den lokala närheten. En synlig lysdiod kommunicerar även att det finns kraft och att mikro-controller och program slingan fungerar.
PicAxe mikro-kontrollanter valdes för robot nervceller eftersom de är små, Billiga och lätta att program. De kräver också ett minimum av ytterligare delar att fungera fullt ut.
Detta instructable handlar främst om arkitekturen i Tinkertrons och robot neurala nätverk. Efter jag bygga en robot som styrs av Tinkertrons, jag försöker och publicera den arbetande koden för den.
Spela med glödande nervceller? En ny ram för interaktiva neuron simulering i hårdvara.
Kombinatoriska logik simulator

Dans RedBot

Artificiell intelligens: Vän eller fiende?

K'nex Rockem' Sockem' robotar

Hur du dåre artificiell intelligens Ai iZ

Mjuk robotar: Göra en konstgjord muskel Arm och gripdon

Artificiell byn

Sprida kärlek med robotar

Artificiella kost för myror

Att bygga robotar med Raspberry Pi och Python

Bekämpa robotar

4 legged Robot Transformation (2 robotar sammanslagning till 1)

Air-drivna Soft robotar med LEGOs

Arduino robotar

BASIC TUTORIAL på ARTIFICIELL intelligens MARKUP LANGUAGE (planlös) VIA anteckningar

Bygga robotar utan formell utbildning

Hur man gör små robotar med nRover styrelsen
