Trådlös, hinder upptäcka, pipa roboten med Arduinos! (1 / 11 steg)
Steg 1: Delar & verktyg krävs








Fjärrkontrollen:
> joystick
> tryckknappar
> fast kärna tråd rulle
> kvinnliga huvudet band
> Arduino ombord
> 433MHz Tx modul
> 9v batteri
> Perf styrelsen att löda allt på
Den Motor skölden: (Du kan hoppa över detta om du köper ett färdigt motorshield... Jag behövde dessa att löda mig!!)
> skärbräda för prototyper innan lödning
> 3 x 16 pin KI Sockets
> 2 x 100uF elektrolytkondensatorer
> 2 X L293D motorn förarens ICs
> 12 x 100 Ohm motstånd
> rulle anslutning kablarna
> manliga och kvinnliga huvudet band
> Perf styrelsen för slutligen lödning allt på.
Larson skannern:
> 5 x röda lysdioder
> ATTiny 85 för Larson skannern (valfritt)
> 5 x 220 Ohm motstånd
> 2 x 74HC595 8-bitars skiftregister IC
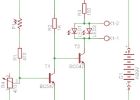
Strålkastare:
> 2 x vita lysdioder
> 2 x 100 ohm motstånd
> 10K Ohm motstånd
> 2N2222A NPN Transistor
> krympslang
MicroController och chassi:
> 4 wheel drive robot chassi.
> Två Arduinos eller kloner (en vardera för Tx och Rx)
> HCR04 Ultrasonic Sensor
> Rulle av ledningar
> manliga huvudet band
> manliga och kvinnliga startkablar
> 12 x 0 .1uF keramiska kondensatorer
Batterier:
> 9V AA batteripack för motorerna, Rx, Arduino, etc.
> 9V batteri för Tx fjärrkontrollen.
Verktyg och diverse grejer:
> lödkolv
> löda Wire
> laptop med Arduino IDE installerat
> limpistol
> en gammal Mini kassett ärende att montera modulen HCSR04... eller något liknande.
Länkar:
> 4 wheel drive chassi: här
> Tx/Rx moduler: här
Resten av komponenterna jag köpte från lokala elektronisk komponent butiker eftersom de är mycket billig!

Lägg till hinder upptäcka morrhår på din Robot

Lättare upptäcka 433 MHz RF Arduino Smart mörkar

Enkla mörkt upptäcka LED robotens ficklampa

Rörelse upptäcka konfetti Bomb

Hinder att undvika Robot med arduino

Arduino tal kontrollera och upptäcka hinder Robot

Underwater metall upptäcka för skeppsbrott Treasure

Hemlig knackning upptäcka låda Lock(origional)

Upptäcka cirklar med OpenCV och Python

ULTIMATE Guide på hur man upptäcker vägglöss | Upptäcka en säng bugg angrepp
Automatisk night-upptäcka skåp ljus

Upptäcka falska polymer vietnamesiska pengar

Att skapa Bookhuddle.com, en webbplats för att upptäcka, organisera och dela bokinformation

Oförstörbar tummen upptäcka handla Stein

Pokemon upptäcka armband

Lätt att göra flytande sil för metall upptäcka
Dark upptäcka nattlampan

Mänskliga upptäcka rådjur skalle ljuset
