Trådlös, hinder upptäcka, pipa roboten med Arduinos! (6 / 11 steg)
Steg 6: Att göra fjärrkontrollen







Jag använde kvinnliga headers för fjärrkontrollen eftersom min Arduino klon hade manliga header stift.
Först göra 4 uppsättningar av kvinnliga rubriker:
> en av 10 stift
> två av 8 stift
> en 6 Pins
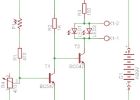
Löda dessa vidare till perf styrelsen lämna ett utrymme på 18 hål i mellan (se bild)
Nästa löda joysticken på plats.
Den har tre stift för varje pott (6 totalt)... När du har lödda joytick, ansluta den första pin 5V, den tredje pinnen till jord och den mellersta pin till Analog 0 på Arduino.
Gör samma sak för de andra tre stift... Förutom ansluta mellersta PIN-koden till Analog pinne 1.
Löda på modulen Tx nästa...
> marken pinnen till Arduino jord
> Vcc stift till Arduino 5V
> data stift till Digital stift 3.
Nästa löda 3 tryckknapparna (du kan lägga till mer om du vill)
Anslut en terminal av varje till Arduino marken och de andra terminalerna till Digital stift 2,4 och 7.
Tillval:-Jag lade till en grön el indikering LED Digital stift 12 eftersom han Arduino är ansluten upp och ner.
Kontrollera din remote byggs nu!

Lägg till hinder upptäcka morrhår på din Robot

Lättare upptäcka 433 MHz RF Arduino Smart mörkar

Enkla mörkt upptäcka LED robotens ficklampa

Rörelse upptäcka konfetti Bomb

Hinder att undvika Robot med arduino

Arduino tal kontrollera och upptäcka hinder Robot

Underwater metall upptäcka för skeppsbrott Treasure

Hemlig knackning upptäcka låda Lock(origional)

Upptäcka cirklar med OpenCV och Python

ULTIMATE Guide på hur man upptäcker vägglöss | Upptäcka en säng bugg angrepp
Automatisk night-upptäcka skåp ljus

Upptäcka falska polymer vietnamesiska pengar

Att skapa Bookhuddle.com, en webbplats för att upptäcka, organisera och dela bokinformation

Oförstörbar tummen upptäcka handla Stein

Pokemon upptäcka armband

Lätt att göra flytande sil för metall upptäcka
Dark upptäcka nattlampan

Mänskliga upptäcka rådjur skalle ljuset
